MSPhysics 1.0.3 (16 October 2017)
-
MSPhysic doesn't work in SketchUp > 2017 but in SU2017 works fine.
-
Hello,
I saw a way to use this to create a walkthrough exactly like I used to be able to do it in an old architect software I had. I can't get it this, or the AMS library to work, just gets a list of errors. I have SketchUp 2020 on a Windows 10 Machine, I'm guessing it is a compatibility issue with either of those. Any ideas? If it requires an update to the plugins, do you have any plans to do that?It will be a real bummer if I have to figure out a different way to do this. I have a lot of difficulty having animations turn out right just using the built in ability with scenes.
Thanks,
Skeeter -
Hello, Skeeter. I mentioned this earlier, but MSPhysics is not compatible with 2019+. I am working on 2.0, from scratch. This is one of the reasons it takes too long to release. I hope to have a working version in June or July. Thanks!
-
Is it possible to create an animation like that; Disappear or appear an object after 5 seconds?
-
Can anyone help me with this simulation of multiple plastic bottles over a conveyor?
I need to know the flow of bottles over the conveyor. Whenever i run the simulation, it crashes.
Don't know the reason.Also, if possible how can i model a simple flat belt that runs instead of this chain type belt. I have attached the file which i modelled in sketchup pro 2017.
-
-
@anton_s said:
.......is one of the reasons it takes too long to release. I hope to have a working version in June or July. Thanks!
Hi Anton
Is there some newsletter - or like, we can subscript to, to be informed when you release the next version?

Jorgensen
-
@jorgensen said:
@anton_s said:
.......is one of the reasons it takes too long to release. I hope to have a working version in June or July. Thanks!
Hi Anton
Is there some newsletter - or like, we can subscript to, to be informed when you release the next version?
Jorgensen
Hi Jorgensen,
There isn't any newsletters. Looks like I am falling behind on schedule with this one. Will do my best.
Thanks,
Anton -
-
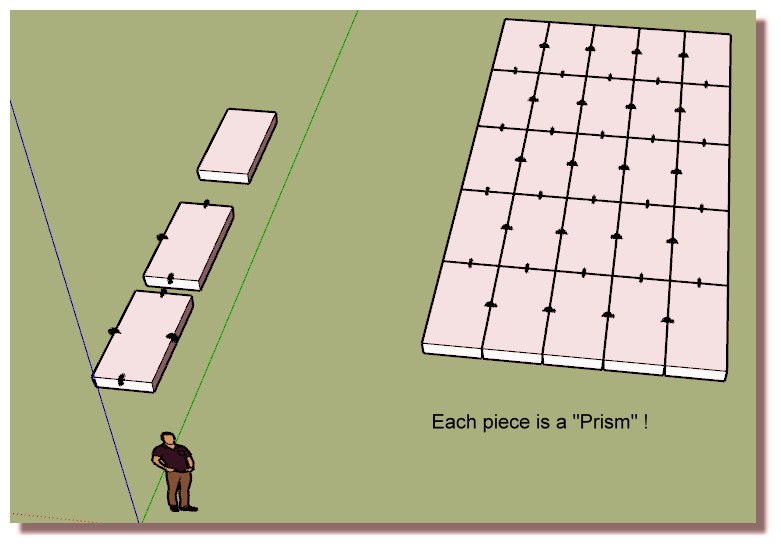
As it's very easy to make this,
 it's a nightmare to make a simple grid with the same "Prismatic" module!
it's a nightmare to make a simple grid with the same "Prismatic" module!  (2 curvatures in the same time)
(2 curvatures in the same time)After tones of traying no success! I must miss something!
Have you some lights about that ?
-
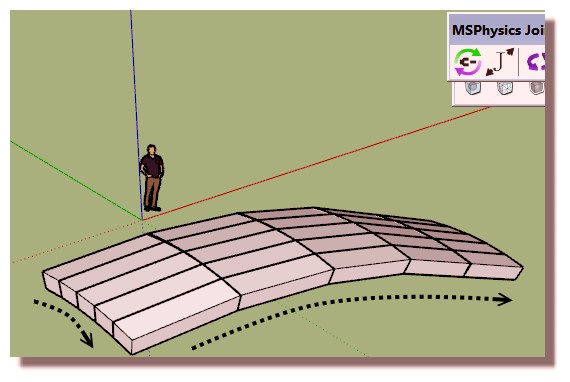
Sorry bad hypothesis !

That can't work with these prisms!
There are overlapings!
Works for 2 perpendicular "lines" but not for a checkerboard!
Here with a pyramid with 5° basis
-
I found my error and won half of joints!

No so evident to find the good angles following sizes!
-
Hello Anton_S
We thank you very much for this effort
I was hoping the work would Export in mdl format
Is there a way for that?Thanks ..
-
Hello ! How can i connect these sliders ( or can be a piston joint )in a way that if I move one the other will move in the opposite direction or to affect its position (without connecting them directly). Thank you!
-
Hello, could you help me?
-
I need a command, a function that allows to find out the position of the pusher at any time by using the keys, for example. At the moment the position of the pusher is bound to the sensor. The box crosses the sensor, the sensor issues a task for the movement of the puher. Also, when we touch the sensor, we display the coordinates of the pusher. The command “puts” didn’t help, it show the text, but we need the changing value.
-
I need a command that is triggered by the condition: "sensor 2" = 1, "sensor 3" = 1, moreover, when the box leaves the sensor's range, "sensor 2" = 0. The pusher moves to a value of -70 when there are 2 boxes on the conveyor in the range of sensors 2 and 3.
The problem is as follows: the pusher is triggered by the condition if laser2 && laser3> 0, fly = -70, written in the script of sensor 3.
But when the box crosses the sensor 3, only one condition is triggered (laser3> 0), the boxes do not accumulate.
Is there a function (onTouch, onUpdate, etc.) where you can write a condition via an if for two sensors?
-
-
Does anyone know of a work around to install on a mac in SKU2019?
-
@eosmontana said:
Does anyone know of a work around to install on a mac in SKU2019?
As per earlier posts in this thread, the extension doesn't work in versions later than 2018 so there's no point installing it for SketchUp 2019. The author is working on a new version and it'll be released as soon as it is ready.
-
Hello are there any updates on when this could be compatible with SU2020 & 2021?
Thanks!
-
@ak-sam said:
Hello are there any updates on when this could be compatible with SU2020 & 2021?
Thanks!
See: http://sketchucation.com/forums/viewtopic.php?f=323&t=56852&start=840#p656107
-
Hi Anton,
Any news on when you'll be able to release an updated version of this wonderful Plugin?
Best,
Juan
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement