MSPhysics 1.0.3 (16 October 2017)
-
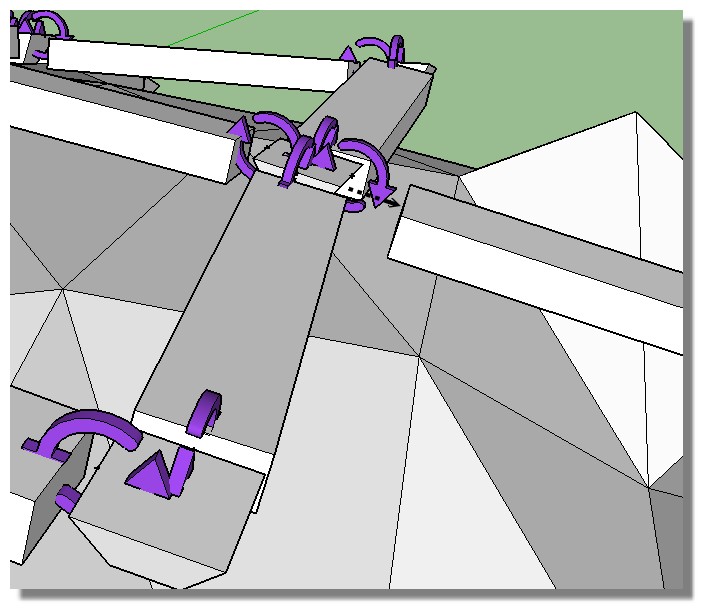
I have some problem to better "past" this articulated structure to the landscape!
Convex Hull is used.What is the process for this sort of thing ?
Density, other sort of hinge, Friction, ... ?
-
Hi, I suppose the geometry of squares and hinges is the limit. Try with univeral joint instead of hinges. Then the squares can become to diamonds.
-
It's not square cube, it's yet "diamond"!

but maybe i have forgotten forget to give these Diamonds "convex" !

change the diamond in convex state ...not better!Universal joint gives more liberties but "fall down" not more to the ground!
here with normal hinge no problem

-
-
-
Shape of the ground: Static Mesh (The hill has concave areas)
Material of blocks: Concrete (More weight for the deformation)
Stiffness of Hinges: 0.95 (The geometry is otherwise too stiff, because the connections allow little lateral twisting.)
-
Excellent! i will study your solution!

I was desesperated! -
So my biggest error was the "Concave surface"!

Will be very good for create very quickly some "roof structures" !
-
Seems very low intensity of Stiffness faraway element!
In case of concave surface maybe other joints can oblige the element to rotate more...? (universal...)
(not yet tested)Here 0.1 stiffness
-
Hello,
I am trying to model a buoyant house simulation- However am having problems keeping the buoyancy in one plane. This is what the pontoon posts are for in real life. If anyone could please help me simulate this that would be great- thank youPage Not Found
Web word processing, presentations and spreadsheets
(drive.google.com)
-
Hello I am looking to model buoyancy, is there a way to stop an object falling over only buoyancy straight up and down
-
Hello philhumphrey ! I have uploaded your file with some modifications. You have to play with density on the house and the buoyant material. and look how joint connection tool works or better you have to play a little with MSPhysics to understand how it works.For this you can download some file on 3dwarehouse searching "MSPhysics".
-
A cool site for tuto about MS Physics!
-
It's been so long when started using Ms physics tool and I have learned so many things from developers but the thing is found on YouTube or over here , is flying an object like helicopter and air plane,
J have downloaded a model of an air plane, the plane can fly yeah, sketchyphysics is used in that model, the I want to ask is, how can do that in Ms physics? -
Hi, I installed the new SketchUp 2019 (Trial) to test it and I have obtain one error message in Ruby Console:
Error al cargar archivo /Users/Oxer/Library/Application Support/SketchUp 2019/SketchUp/Plugins/MSPhysics/main_entry.rb Error; #<IOError; The required, staged c extension file, "/Users/Oxer/Library/Application Support/SketchUp 2019/SketchUp/Plugins/MSPhysics/libraries/stage/osx64/2.5/msp_lib.bundle", is missing!> /Users/Oxer/Library/Application Support/SketchUp 2019/SketchUp/Plugins/ams_Lib/extension_manager.rb;204;in `block in require_all' /Users/Oxer/Library/Application Support/SketchUp 2019/SketchUp/Plugins/ams_Lib/extension_manager.rb;201;in `each' /Users/Oxer/Library/Application Support/SketchUp 2019/SketchUp/Plugins/ams_Lib/extension_manager.rb;201;in `require_all' /Users/Oxer/Library/Application Support/SketchUp 2019/SketchUp/Plugins/MSPhysics/main.rb;70;in `<top (required)>' /Applications/SketchUp 2019/SketchUp.app/Contents/Frameworks/Ruby.framework/Versions/2.5.1/lib/ruby/2.5.0/rubygems/core_ext/kernel_require.rb;59;in `require' /Applications/SketchUp 2019/SketchUp.app/Contents/Frameworks/Ruby.framework/Versions/2.5.1/lib/ruby/2.5.0/rubygems/core_ext/kernel_require.rb;59;in `require' /Users/Oxer/Library/Application Support/SketchUp 2019/SketchUp/Plugins/MSPhysics/main_entry.rb;15;in `<top (required)>' /Applications/SketchUp 2019/SketchUp.app/Contents/Resources/Content/Tools/extensions.rb;197;in `require' /Applications/SketchUp 2019/SketchUp.app/Contents/Resources/Content/Tools/extensions.rb;197;in `load' /Users/Oxer/Library/Application Support/SketchUp 2019/SketchUp/Plugins/MSPhysics.rb;21;in `register_extension' /Users/Oxer/Library/Application Support/SketchUp 2019/SketchUp/Plugins/MSPhysics.rb;21;in `<module;MSPhysics>' /Users/Oxer/Library/Application Support/SketchUp 2019/SketchUp/Plugins/MSPhysics.rb;5;in `<top (required)>'MSPhysics v1.0.3 & AMS Library v3.6.0h
SU2019 (Trial) & macOS 10.13.6 -
Thanks for letting me know. I sort of intend to rewrite MSPhysics over simply recompiling the libraries, which should take a while.
-
Thanks for the info.
-
Hi there,
Im trying to apply breaking forces's to scaffold components to simulate when it will fail under a set load.
It looks to be possible by setting a breaking force to the fixed joint. the problem im having is the numbers are not making sense, e.g. when i rest a mass of 4kg on a joint with breaking force of 1962N (equal to 200kg of force) it breaks.
Am i messing up the settings?



-
Hello Ash Henderson,
You are not messing anything up. Forces from the fixed joints are indeed incorrect. This is a bug in MSPhysics and I will fix it on the next release.
Thanks,
Anton -
Thanks Anton, im looking forward to it!
MS Physics has been great in simulating the failure in overloading or over extending cantilever scaffolds.
Keep up the good work, You are doing a fantastic job!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement