Urban simulation with MSPhysics
-
Here's another attempt to get a 3D Warehouse model up and running.
And so I continue to try to simulate upright walking or running with SketchUp and MSPhysics.
Never thought that would be so complex and all parts have to be adjusted exactly..
Mass of body parts, speed, position and programming of the MSP joints, damping, frictional resistance of shoes and ground - everything interacts sensitively.
Running and jumping movements are particularly difficult as the feet tend to break through the ground.
The MSPhysics joints reach their limits and centrifugal forces or shocks, for example, cause the feet to swing out of their imaginary joints.
Falls and fidgeting on the ground are not uncommon during the test runs..
-
Holy moly, this is something, here I am trying to get a frigging treadmill to work with no success and you all Topgun.
I need your skills.
-
Walking is hard for any simulation program and even research labs with millions to spend. You are doing great.
-
Very nice.
I really like the night NPR image. An animation in that style would be awesome.
The only thing missing is some light from the thrusters and maybe some more lights in some of the building.
Great job! -
When it come to motion, you are THE class act. Marvelous.
-


 Faust, with my mouth open I stand there and marvel and I sincerely bow to this class! I love all this even without ever striving or understanding how all this works ... Great!
Faust, with my mouth open I stand there and marvel and I sincerely bow to this class! I love all this even without ever striving or understanding how all this works ... Great! -
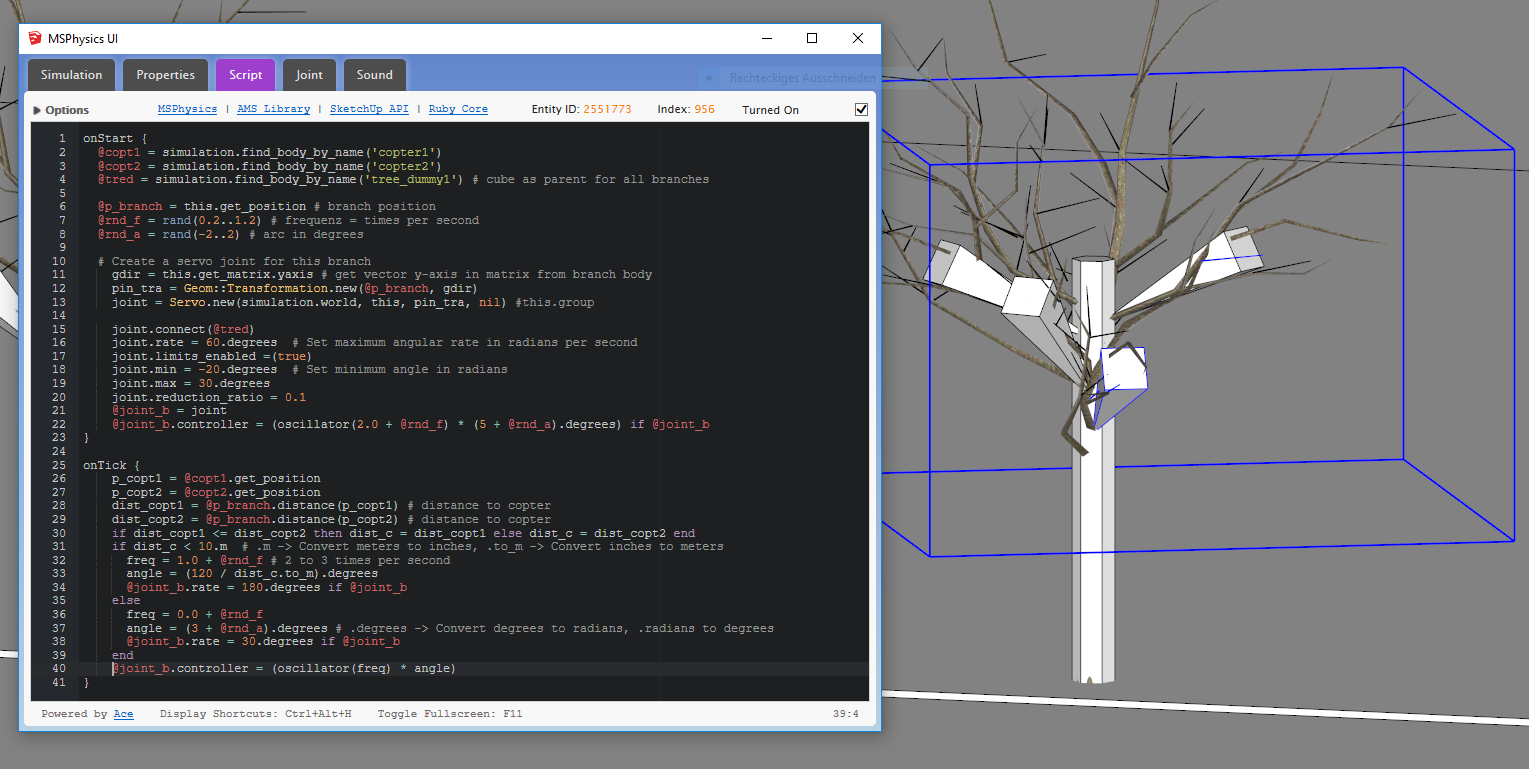
Could you elaborate on how you did the animated tree branches simulation?
-
Thanks for the encouraging words!
An animation in the NPR style is my goal. The picture in the first post above is a single frame from an early stage.
There are still missing animated people, other animated objects, lights, etc ..
For the finished one-minute film with a few camera shots, both of my computers each need about 1 week of computation time with an average of 6 minutes of rough rendering per image (1920x1080 pixels, indigo RT).
Next, four movie layers are superimposed in the video editing program - SketchUp Lines-and-Colors, pure rendering, and two graphic layers created with FotoSketcher from the rendered images.
Several filters are used for the overlay then ..

-
The animated tree branches are components extracted from trees, which in this case can be copied arbitrarily and generate a servo joint with a MSPhysics script, wiggle and react to passing copters.
The large blue box in the GIF is the tree dummy with witch all branches self connect.
The GIF shows most of the active simple physics geometry. The geometry to be rendered is too complex for the calculation and is therefore physically ignored. Most smaller objects outside the camera's field of view are hidden. The rain simulation is not shown here.
-
Playing with the architecture - from scaffolding character to more organic shapes in the exterior dungeon of the buildings.
-
Very nice, a brilliant demo of your ability.
-
Here is an attempt to summarize the essential components of the simulation very briefly. In complex MSPhysics simulations, it makes sense to separate the collision geometry from the visual geometry ...
-
Thank you, a privilege to see.
-
Thanks Mike,
i struggle with details and especially with the light in rendering animations …
Try to understand why certain lights in IndigoRT suddenly turn brighter or darker.
-
23 joints, 2 beautiful eyes and the movements of the cloned model are halfway liquid ..

Lost in character animation again - endless test series, felt 250 set screws.
Each joint with at least 5 settings, each body part with position, mass, collision and friction properties, a little script, a bit of practice as Frankenstein and some time ..
Sorry for the GIFs with that massive reduce of load time.
-
How joints are regulated? by cursors ? Times lines ? ...
-
Amazing job you are doing with animations, thanks for keeping us up to date.
-
@ pilou
The connections are controlled via a kind of timeline for each character in a script.
I have predefined several types of movement, which can then be modified and combined as desired.
Since several people are to act in a complex model, a real-time control via mouse or keyboard in SketchUp is not controllable.
For smaller environment models, however, it is possible to control a figure via mouse and keyboard in MSPhysics in real time ..@ Mike
Thanks Mike.
There is also a bit of enthusiasm for MSPhysics behind it.
I do not want the interest in it breaking off.
Maybe there will eventually be a further development that is even more user-friendly ..
-
how great it is to see something reaching this state of high level.
And just like Mike said it above: thank you for keeping us informed here! -
Thanks HornOxx,
hope this WIP comes to an end soon ..
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement