MSPhysics 1.0.3 (16 October 2017)
-
@Patrick: Twilight has an "Animation Editor" under "Twilight Render V2" in the extensions pull-down menu. There you can select quality, resolution, MSP Replay output etc. It could be helpful to test which scenes you include ore exclude into an animation in scene settings.
@rick149: great detailed model! Can't wait to see it in action.
-
Hi Anton,
Do you see a possibility that "non-collidable" set objects will be ignored by the Buoyancy Plane? -
Hi Anton, I'm hoping you may be able to diagnose an issue with recording MSphysics animations. With an evolved version of my model posted above containing a flat electrical cable that wraps around the interior of a hollow drum, SketchUp crashes (bug splat) when I click the Reset Simulation button after recording anything more than a few hundred to perhaps a thousand frames. My goal is to allow the simulation to run for about ten thousand frames (and then export 1920x1080 PNG frame files at a time scale of ~13, so that I end up with 700 to 800 actual PNG files). In order for the simulation to not encounter object penetration and collision problems the Update Timestep needs to be about 1/420 or smaller (which results in a large number of computed frames for a given real time sequence).
I would dearly love to be able to record a simulation where the drum (who's motor controller I activate manually right as the simulation starts) is allowed to rotate nearly 7 times, then the controller is set to zero and the simulation is allowed to settle for a bit. However, the MSphysics recorder seems to cause the extension and all of SketchUp to crash when resetting the simulation (clicking the "<<" button) after more than about 1/2 to 1 revolution of the drum.
I have tried SketchUp 2016.1 and 2017.3, with similar results. I am running this on an iMac with 32GB of memory. The SketchUp process grows to between 9GB and 10GB by the time seven rotations of the drum have occurred and 9700 to 10000 frames have been computed (and I'm ready to click the Reset "<<" button). The computer has sufficient memory to support this, though the simulation eventually runs quite slowly as the process expands memory bit by bit by bit, only doing a few frames every few seconds. My last run took about 2.5 hours of elapsed time to compute those seven rotations. That amount of compute time would be OK if the result was a usable recording.

By the way, a few weeks ago you had posted a revised version of my flexible cable model that uses fixed joints (between the ~250 cable segment objects) instead of hinges (as used in my versions of the model). I have tried that fixed-joint approach, but the resulting floppy behavior of the cable is not as appealing to me as the behavior that occurs with the hinge joints, so I prefer to use the hinges.
-
@rick149 said:
Gday
Can I control the order in which the sliders appear in the MSPhysics Control Panel?I find the order of controls varies when I edit/change joints but cannot see the logic behind it.
It does not always seem to be controlled by the order in which joints are created and/or when they are edited.
My model is managed as an evolving assembly of models and components including joints, some with controllers, some without and some with keyboard control.
I have the design of the assembled model and the assembly procedure down pat now so that when I change and re-import the different parts, all the joints and their controls work perfectly but I cannot consistently maintain their order in the panel after various changes are made.
Ideal would be... can I vary the panel order after the joint controllers are in place?
-
I need to create a very floppy long mattress/cushion and drape it realistically over the seat, arms, and back of a piece of furniture. There's a tutorial with french subtitles and no audio about cloth simulations, but my french isn't good enough and I am looking to learn more. If anyone can point me in the direction of some instruction, I'd appreciate it.
-
Hi Anton, I realized an unstable gyroscope. The rotor is controlled with the spacebar. Can we make it stable? thank you
episode 2
Hello Anton, I can not regulate MSphysique so that the bearings are not transparent. what to do. thank you
-
Would you please add ropes to your to-do list? Thank you
-
the link of (Compatibility and Requirements//AMS_Library 3.5.0+) say " The requested topic does not exist."
So go to link (http://sketchucation.com/forums/viewtopic.php?t=55067) to get it -
Hi all and Happy Christmas!
I have one issue to solve...
- I have one group of objects that shall move linear in one direction.
- I have another group of objects that shall move linear in 180° opposite direction simultaneously.
Is that possible to achive with just one slider controller?
Edit: I solved it myself. 2 pistons (one turned 180°) , same name, 1 controller.
-
Is it possible to create/script a hall sensor functionality detecting magnetism strength and direction?
-
I recently completed a detailed (nearly 18 minutes long) video animation that includes two sequences created with MSPhysics - the first at 8:00 into the video, the second at 14:00. The subject of the video is a description of some real space hardware, the surface sampler or "scoop" from the Viking '75 Mars lander of 40 years ago.
The first MSPhysics sequence uses about 250 short thin strips to represent a flexible cable winding and unwinding. The second sequence contains about 5500 little marbles to represent soil particles being dug by the Viking lander's sampler backhoe or shovel. (The remainder of the animations were created with the Animator beta extension.)
Thank you for such a nice MSPhysics extension, Anton!
https://youtu.be/4c5o6jaJOuI -
Absolutely great!
-
Incredible work, congratulations!!

-
Tom Dahl, I did see your viking lander video - very inspiring and educational! I also commented at your Sketchup Community thread. Nice work!
Aside from that, I have logged all the crash reports, issues, and feature requests reported by you and many others. I have learned many things from the feedback. MSPhysics will be rewritten, with tutorials this time...
-
Tom Dahl, I cannot find superlatives adequate to describe your historic video that so effectively diplays the ingenious viking sampler for us mere mortals. thank you. thank you.. more please..
-
@anton_s said:
Tom Dahl, I did see your viking lander video - very inspiring and educational! I also commented at your Sketchup Community thread. Nice work!
Aside from that, I have logged all the crash reports, issues, and feature requests reported by you and many others. I have learned many things from the feedback. MSPhysics will be rewritten, with tutorials this time...
I really like your Nasa's Viking project videos Tom. Great job.
Anton, don't you forget the plugin for soft and cloth surfaces. I'd like to test it and if you want I can help you to debug it.
-
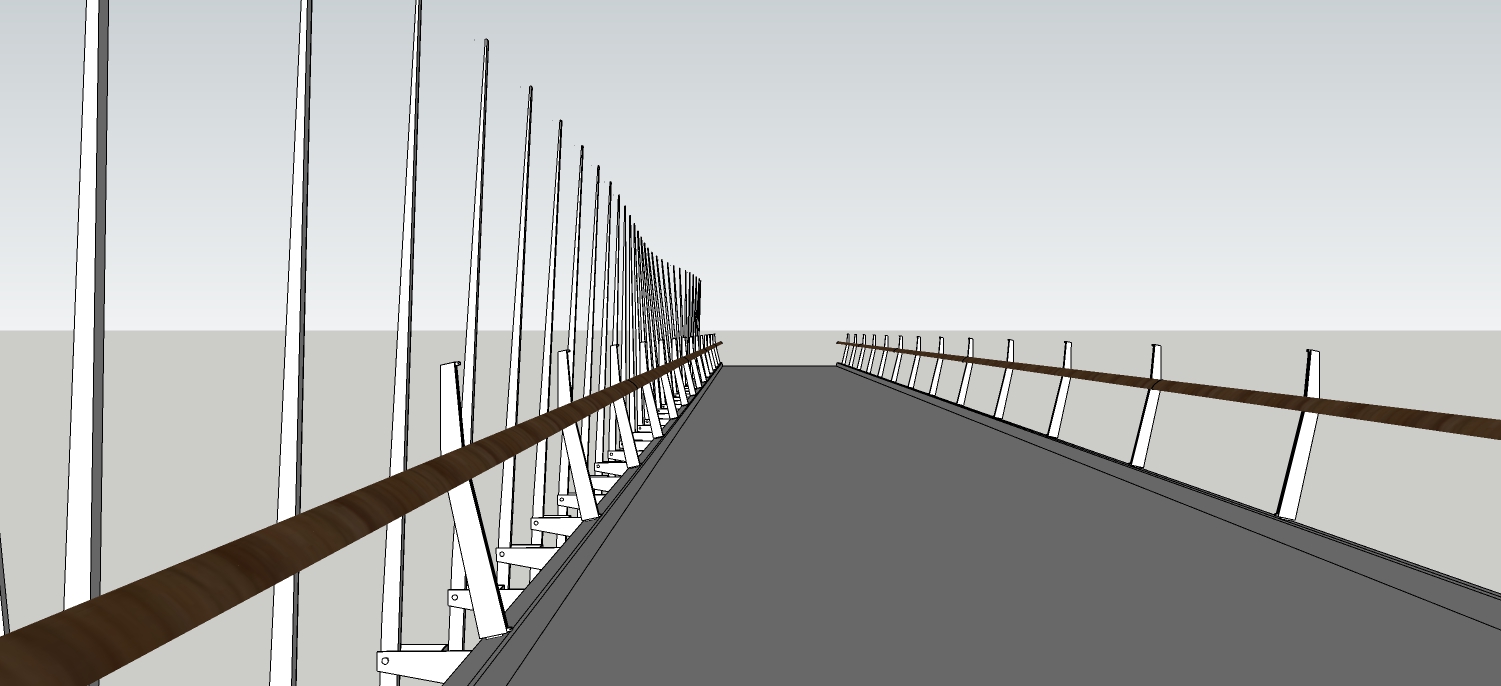
Hello, I am working on a project to create a long torsion wave as an interactive artwork on a bridge. I have been able to simulate the wave behavior in MSPhysics. I am psyched for that but now I would like to simulate the interaction which will be driven by sensors controlling motors that will pull the pendulum top in towards the bridge when a person breaks an IR beam. I'd like to be able to click on one of the pendulums and have it move in at a user defined rate and then release and swing freely. Is there a way to do this? I have seen something in the API called onLButtonDown but also best_picked in the sketchup API but I am not really a programmer and am not sure how to put these together if they are even appropriate. Might someone be able to help? or at least suggest an approach?
-
Hello, charlessowers,
I'm not quite sure what you're trying to achieve. Using a simple pick and drag tool may help. Just hold the shift key when dragging the IR beams.
If in case you want to do something else, perhaps an onClick even will help. For that you will have to utilize an onClick event for all beams, which will do the desired thing when a beam is clicked. (And of course, to write the same script to all beams you can write script to one beam and make use of the "assign script to all with name" button).
Anton
-
Hello Anton,
Thanks for the plugin and thank you for considering my question.
An onClick sounds like a great possibility, but I am not sure how to use it. I tried this script applied to a picket...
# Triggered when simulation starts onStart { @force = 45 } # triggered when body is clicked onClick {|point| fx = @force this.add_force(fx, 0, 0) }But it didn't work. maybe it needs time for the force to be applied after the click? Maybe it should be a torque? Maybe it should set the start angle of the spring hinge? Not sure if onClick always applies to the thing clicked (this)?
-
Charles,
You got the idea right, but the force you apply must be applied as a point force. Doing so will also, generate torque as you want. For the point, you can either apply force at clicked location or at a particular point such as pole's origin + some shift in the up direction...
Here is the script for applying at point force:
# Triggered when simulation starts onStart { @impx = 45 * simulation.update_timestep_inv } # triggered when body is clicked onClick { |point| this.add_point_force(point, Geom;;Vector3d.new(@impx, 0, 0)) # Or point could be a custom point #tra = this.normal_matrix #point = tra.origin + AMS;;Geometry.scale_vector(tra.zaxis, 100) #this.add_point_force(point, AMS;;Geometry.scale_vector(tra.xaxis, @impx)) }Note that in the simulation tab, you will have to enable the game mode option, which will disable the pick & drag tool, to prevent it from interfering.
Then, the script is then supposed to be assigned to every pole thingy in your model. As mentioned before you can do this by using the "assign script to all with name" button (assuming that all pole thingies have the same name).
Anton
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement