Modeling buildings from multiple matched photos
-
I am trying to model buildings from multiple matched photos.
It's obviously possible to do, but my question is: how accurate can we expect to be with this?
I have tried multiple times, and have learned a good bit about repositioning the axes, saving each matched photo as a different scene with its own origin location, only using corner photos, etc.
Every time I try, however, features end up not matching between the photos.
At this point I THINK the key is to have the different origin points related dimensionally in space as they are on the actual building. In other words, I think you need to establish the real spatial relationship of the origin points before trying to "trace" over the matched photos.
Before I buy a laser level and rangefinder, what I want to know is this:
Is it a fool's errand to try to model complex building exteriors using this tool? Are there other variables (focal length, depth of field, etc.) that make it inherently inaccurate?
I really love the feature, so I'm hoping I can get this figured out.
Thanks
B
-
You could try Tgi3D Photoscan 30 day trial. It's made exactly for this type of thing.
-
It is tricky, for sure, to get multi-image PhotoMatch projects to work.
One thing that may cause problems is that no lens is perfect.
Most wide angle lenses get a barrel, and most teles get a pillow radial distortion. This is usually more pronounced in zoom lenses than in primes.
This should really be corrected to get good results, and that is what real photogrammetry apps do.
It may be done with PS, AcDSee or other tools like PTgui and other panorama stitchers.Another thing that may cause problems is that house corners aren't always 90 degrees, particularly in city streets. Very often they follow the street instead of being perfectly squared corners. As SU relies on such corners being 90 degrees it fails when trying to force the photo into a model with 90deg corners.
Using cropped photos is another source for problems - always use the full image.
Always try to avoid ground lines for aligning perspective. The ground is rarely completely level (at least here in Norway .
.
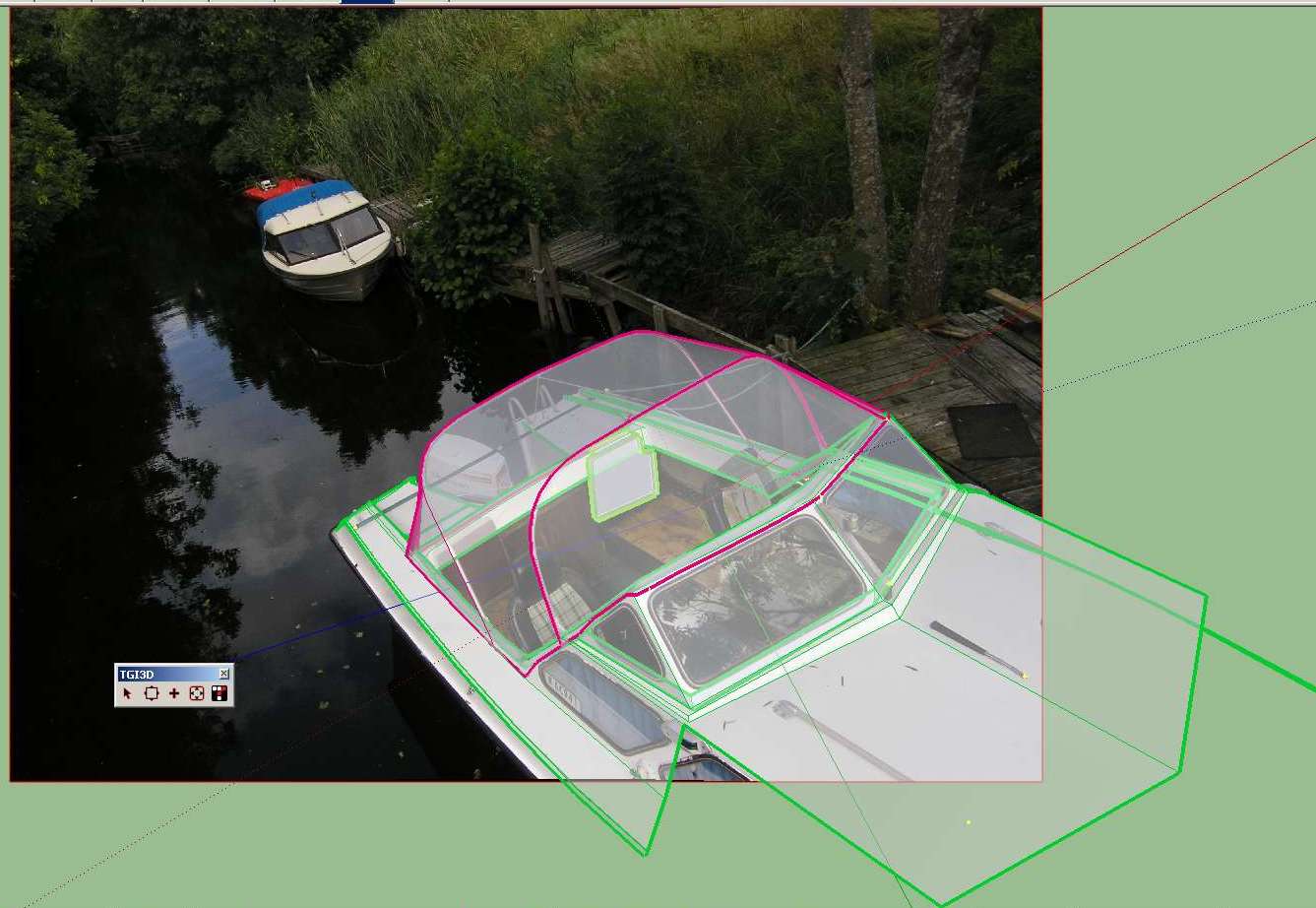
PhotoMatch is great fun to use, and very fast, but it does have its limitations.There is a real photogrammetry solution for SU now, PhotoScan from tgi3D. I'm testing it right now (30 days full version trial), and it is very promising. It uses triangulation to place points in 3D space, and then allows you to build the models quite easily inside SU. Like this partly built boat made from 5 photos (too closely for capturing the full boat).
-
Thanks so much for the help. I asked the same question at the google sketchup forums and got no response.
This Tgi3d photoscan tool looks amazing. Im going to have to try it out.
Does it correct the lens distortions you mentioned?
-
Yes, it undistorts the images. There is an external program where you match ponts in the various photos. Then it calculates 3D space vertices for those points and distortions for the lens(es)before it exports it all to a set of photomatched scenes in SketchUp format.
-
So Im trying out the cgi3d photoscan product.
Im having problems with the camera calibration tool. Once I set up all my matched points and try to run the camera calibration, it tells me that it doesnt recognize my camera sensor size, and prompts me to put it in manually.
I do this, and click save on the camera settings dialog box - but it does not save the setting. The dialog box is blank again when I re-open it.
Also, when I calibrated the camera (apparently without saving my sensor size), and build the model in the calibration program, I get a warning that some points are "behind the camera", and this will cause inaccuracy.
When I export the project and open it in SU, there is a weird axis alingment. The manual doesnt talk about how to align the axes once you import the project from the calibration program.
Is this (axis alignment) supposed to be done via view locking?
sorry for the barrage...
-
@unknownuser said:
use SketchUp native "Tools --> Axes" command followed by "Edit --> Update Tgi3D page axes". In this method, you can guarantee exact alignment of only one axis.
Have you check the point errors after running calibration? These will show you misalignment of points between photos. You can also give points a distance in the 3D model within Photoscan.
Did you watch the video on the Tgi site? I recommend you watch it as it's a good starting point for workflow.
-
Rich,
Just watched the video...very helpful.
Still, it seemed that when the project was imported into photoshop, the axes were positioned as they should be.
Maybe mine was off because of matching inaccuracy. I had some that were way off. Ill try again.
-
Hi wiskeytangofoxtrot,
@whiskeytangofoxtrot said:
So Im trying out the cgi3d photoscan product.


@whiskeytangofoxtrot said:
Im having problems with the camera calibration tool. Once I set up all my matched points and try to run the camera calibration, it tells me that it doesnt recognize my camera sensor size, and prompts me to put it in manually.
I do this, and click save on the camera settings dialog box - but it does not save the setting. The dialog box is blank again when I re-open it.
Another way to see if the settings have been saved, is to double click on the image name in the “Photo Files” tab of the “Project” window and check the information on “Image Info” dialog box. Do you see the sensor size information there?
If a camera is not found in the database, the user can add it to the local database using the camera info dialog box (Edit --> Camera Info...) which I believe you tried to do. In that case, please make sure that the local database file was created successfully by checking “User camera database:” file path from “Edit --> Preferences” in the preferences dialog box.
@whiskeytangofoxtrot said:
Also, when I calibrated the camera (apparently without saving my sensor size), and build the model in the calibration program, I get a warning that some points are "behind the camera", and this will cause inaccuracy.
When you get this message, in almost 99% of the time it means that calibration has failed. Please make sure that you have enough matching points (roughly about 10 per photograph) and there are no matching inaccuracies, i.e. wrong points have been matched.
After calibration check error information on the “Point errors” tab. This list gives you an idea about matching errors. It is possible to reduce the point errors by adding more points and adjusting the positions of the existing points. Big point errors usually mean that there is a mismatch of points, i.e. there is at least one point in one of the matched points group that does not belong in that group.
@whiskeytangofoxtrot said:
When I export the project and open it in SU, there is a weird axis alingment. The manual doesnt talk about how to align the axes once you import the project from the calibration program.
Is this (axis alignment) supposed to be done via view locking?
There are two ways to align axes:
First one is, to assign x,y,z coordinates to some of the calibration points to make sure axes are aligned to the objects in the photos. You need to give coordinates to at least three points to be able to align all three axes. However you need to be careful that the relative coordinates of these points must be meaningful. The bigger the error in the coordinates the larger the calibration error. If you enter some really wrong coordinate values, calibration may fail altogether.
Second method is what Rich quoted, i.e. to use SketchUp native "Tools --> Axes" command followed by "Edit --> Update Tgi3D page axes". In this method, you can guarantee exact alignment of only one axis.
-
Hi Gulcan,
Thanks for the help.
This is the file path that is shown in my preferences dialog box:
C:\Documents and Settings\Administrator\Application Data\Tgi3D SU Photoscan Camera Calibration Tool\camera.db
I don't know what this tells us.
When I try to manually put in the sensor dimensions under edit -> camera info, the information does not save, apparently. When I re-open this dialog box after trying to input my sensor size it is blank.
Thanks
B -
also, the image info box, when I click on an image filename, has my camera make and model, and "6.5 mm" under focal length, and "35mm camera" under sensor size.
The info I found online had my sensor size listed as 6.17 x 4.55mm, and my focal length as "equivalent to 35mm camera: 36-108mm"
-
Wow, great bit of software Wish I could afford it!
-
@whiskeytangofoxtrot said:
also, the image info box, when I click on an image filename, has my camera make and model, and "6.5 mm" under focal length, and "35mm camera" under sensor size.
The info I found online had my sensor size listed as 6.17 x 4.55mm, and my focal length as "equivalent to 35mm camera: 36-108mm"
OK, I now figured out (I think) why it seems you could not save the sensor info. When you enter the sensor info into the camera info dialog box, you need to enter the camera make and model exactly as shown in the "Image Info" dialog (taken from EXIF info in the image file), because the make and model entered in the dialog box is compared with the camera make and model from the image EXIF info.
The sensor size information (width and height) you see in the "Image Info" dialog box is a default "guess" value that the Calibration Tool tries to use when the camera is not found in its own database, but sometimes it is not a good guess for the actual camera, as is the case with your camera here.
Now try to enter your camera information into the database one more time while making sure that camera make and model info is exactly the same as it is shown in the "Image info" dialog box. We will go over the warning message and the user interface here to make sure we provide better guidance and help to the user when we encounter a new camera that is not found in the Calibration Tool's own database.
-
Thanks Gulcan.
Unfortunately I can't try till I get off work later.
The sensor size info I found online is listed as "6.17mm x 4.55mm"...do these dimensions correspond to Length and Width, respectively?
B
-
@whiskeytangofoxtrot said:
The sensor size info I found online is listed as "6.17mm x 4.55mm"...do these dimensions correspond to Length and Width, respectively?
They correspond to width by height, respectively i.e.
sensor width = 6.17mm
sensor height = 4.55mm -
Thanks...it worked

This thing looks promising...
-
When I import my model in sketchup and align the axis via the axes command, then "update tgi3d page axes", something strange happens with the orbit tool.
Im no longer able to rotate the model around the blue axis with the orbit tool. When I have the cursor below the origin and move it left to right, instead of rotating about the vertical axis, it tilts it. Whats up with this?
When I copy the whole thing into a new drawing file, the problem disappears.
Thanks.
-
Hmm.. That is weird... Could it be a scale issue? Did you scale the model properly, i.e. assign a distance between any two points, before exporting to SketchUp? SketchUp does not behave well when objects are very small.
The quality of calibration is important as well, I am not sure if it would cause this problem specifically, but things sometimes do behave strangely if you open a badly calibrated model in SketchUp. Did you check the "point errors" tab in the Tgi3D SU PhotoScan Calibration Tool before exporting the model? Try to make sure that all the point errors are less than 1-2 pixels.
If you still experience the problem, could you please send it to us by uploading it from the Support page on our website. Since it will have images, I assume it might be too big to upload here.
-
@gulcanocali said:
Hmm.. That is weird... Could it be a scale issue? Did you scale the model properly, i.e. assign a distance between any two points, before exporting to SketchUp? SketchUp does not behave well when objects are very small.
I thought it was, because the orbit tool was behaving the way it does when you are zoomed in really tight to the origin. I went back and scaled the model in the calibration program, and brought it back in. It didn't seem to solve the problem.
One thing I did notice...the orbit problem only happens after I re-align the axes. I almost want to say it's still orbiting around the original origin point. I don't know, I'll have to play around with it further.
@unknownuser said:
The quality of calibration is important as well, I am not sure if it would cause this problem specifically, but things sometimes do behave strangely if you open a badly calibrated model in SketchUp. Did you check the "point errors" tab in the Tgi3D SU PhotoScan Calibration Tool before exporting the model? Try to make sure that all the point errors are less than 1-2 pixels.
Wow, 1-2 pixels? I was off by several, but I thought that was still good...before I got my camera issue straightened out, it was like hundreds to thousands
Is that still realistic for big wide shots of buildings?I appreciate your help. It looks like an amazing product, especially that lock vertices tool. Even without getting it dialed in, I have a model that matches the photos 10x better than without the plugin.
Thanks,
B
-
@whiskeytangofoxtrot said:
@gulcanocali said:
Hmm.. That is weird... Could it be a scale issue? Did you scale the model properly, i.e. assign a distance between any two points, before exporting to SketchUp? SketchUp does not behave well when objects are very small.
I thought it was, because the orbit tool was behaving the way it does when you are zoomed in really tight to the origin. I went back and scaled the model in the calibration program, and brought it back in. It didn't seem to solve the problem.
One thing I did notice...the orbit problem only happens after I re-align the axes. I almost want to say it's still orbiting around the original origin point. I don't know, I'll have to play around with it further.
OK, I am at a loss about the orbit problem you are experiencing at this point. We will continue to look further. It would really help if you could upload your model for us to take a look.
@whiskeytangofoxtrot said:
@unknownuser said:
The quality of calibration is important as well, I am not sure if it would cause this problem specifically, but things sometimes do behave strangely if you open a badly calibrated model in SketchUp. Did you check the "point errors" tab in the Tgi3D SU PhotoScan Calibration Tool before exporting the model? Try to make sure that all the point errors are less than 1-2 pixels.
Wow, 1-2 pixels? I was off by several, but I thought that was still good...before I got my camera issue straightened out, it was like hundreds to thousands
Is that still realistic for big wide shots of buildings?The better the calibration the better the model matching the photos of course. But you can run the calibration with "Create calibration uncertainty information" option. After that you can check the distance between any two points and look at the uncertainty range provided. If the uncertainty range is acceptable for your application, you can use that calibration.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement