Model.raytest broken in SU8!
-
I just discovered a troublesome bug in SU8 where model.raytrace returns bogus data. In my case it returns 0,0,0 as point and a random ConstructionPoint as something it his - which is clearly NOT the case.
See attached screenshots from SU7 and SU8.
If you open the sample model:
Select the second ConstructionPoint from the left
In the Ruby Console:
` model = Sketchup.active_model
sel = model.selection
cp = sel[0]returns #Sketchup::ConstructionPoint:0xfe63340
ray = [ cp.position, Z_AXIS.reverse ]
t = model.raytest( ray )returns [Point3d(0, 0, 0), [#Sketchup::ConstructionPoint:0xfe63124]]`

-
Ugh.... is the only workaround to test for results where the hit point is not on line with the ray and do a custom ray trace method using Geom intersect methods? As if the raytest wasn't slow enough...

-
I can't make sense of why just some ray tests fail...
-
Have you tried making a brand new vector
zDown=Geom::Vector3d.new(0,0,-1), instead of usingZ_AXIS.reversein case that's the glitch ?

-
@tig said:
Have you tried making a brand new vector
zDown=Geom::Vector3d.new(0,0,-1), instead of usingZ_AXIS.reversein case that's the glitch ?
Does the rolling eyes mean you got it working?
Creating a new vector made no difference - and I don't see why it would, it's a frozen constant.
Did you suspect the.reversemethod to be faulty? -
Don't read too much into the rolling eyes - desperation at the v8 API breaking things...
I just threw in some random ideas...... Sometimes the simplest thing is the answer... Sometimes it's NOT
-
yea - I tried it because - it might just have been that. I've learned from SU to never ever make solid assumptions.

-
Hi,
Does all this mean that scripts that use raytests (compo spray for instance) are broken in SU8 ? 
-
Looks like it.
I've been doing some tests with my test model.If I erase all CPoints the rays shot are working.
If I group the CPoints the rays shot are working.
If I group the CPoints, and then enter the group some rays shotstart failing.So at the moment it appears that CPoints in model.active_entities can cause raytest to fail.
This is a major breakage IMO. I really hope we don't have to wait months for a maintenance release.
-

-
I'm still trying to work out why/which rays fail. I've seen no pattern so far.
All I manage to do now is detect incorrect rays, by comparing the vector from the point shot to the point hit, is it's not in the same direction of the ray then it's the bug that has struck. But atm the only workaround I've come up with is manually iterate the model and run intersect_line_* on all the entities. Basically rewrite of the raytest - just slower.
-
I can confirm that this bug has broken my scripts as well. I add cpoints based on where the ray interects with a face, and the points get added "out in the weeds", not on the face. CB.
-
@daiku said:
I can confirm that this bug has broken my scripts as well. I add cpoints based on where the ray interects with a face, and the points get added "out in the weeds", not on the face. CB.
If you cache the points for where you place the CPoints until after you have done all the raytracing, does it work then? (Ensuring there are no CPoints in current context before you start)
-
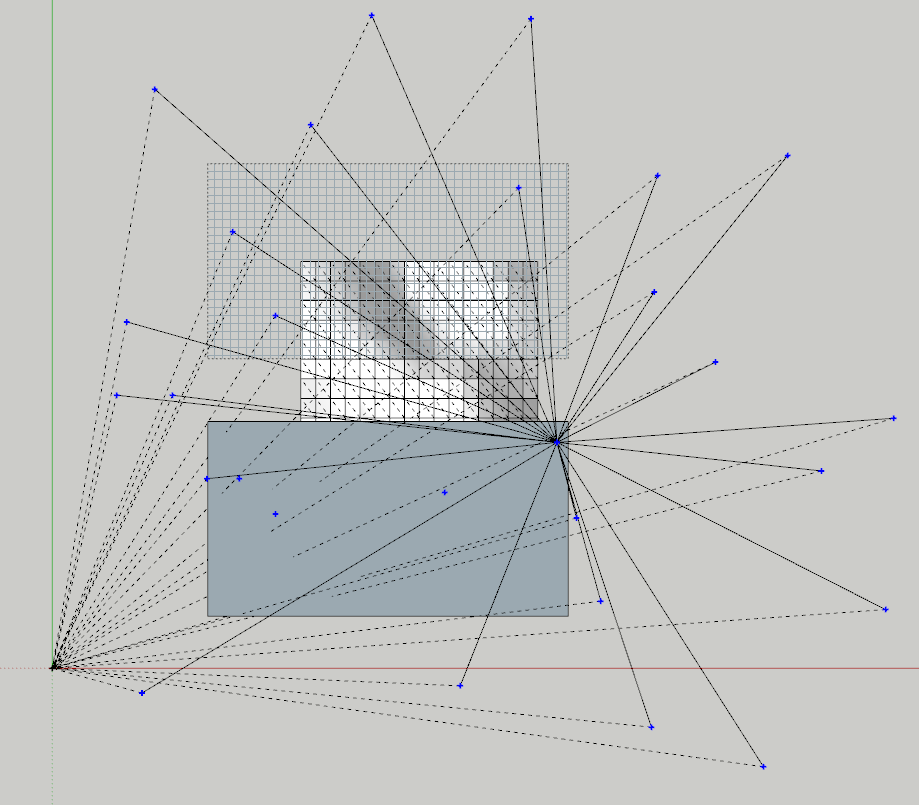
Trying to visualize the data to find a pattern in the failure - without any luck.
At appears that all raytests that fail and return 0,0,0 all report the same CPoint in the path array.
However, removing the CPoint they all refer to and on the next run they all refer to another one. It appear to be random junk data.
Still not seeing any patterns in the rays that fail...
` #Sketchup::ConstructionPoint:0xfea9f70 - Point3d(375.81, 168.165, 306.856)...
#Sketchup::ConstructionPoint:0xfea9bd8 - Point3d(66.8371, -18.5047, 306.856)...ERROR!
[Point3d(0, 0, 0), [#Sketchup::ConstructionPoint:0xfea9f70]]
Vector3d(-66.8371, 18.5047, -306.856)
#Sketchup::ConstructionPoint:0xfea9854 - Point3d(303.817, -13.1038, 306.856)...
ERROR!
[Point3d(0, 0, 0), [#Sketchup::ConstructionPoint:0xfea9f70]]
Vector3d(-303.817, 13.1038, -306.856)
#Sketchup::ConstructionPoint:0xfea94e4 - Point3d(237.913, 486.227, 306.856)...
ERROR!
[Point3d(0, 0, 0), [#Sketchup::ConstructionPoint:0xfea9f70]]
Vector3d(-237.913, -486.227, -306.856)
#Sketchup::ConstructionPoint:0xfea9174 - Point3d(450.857, 366.827, 306.856)...
#Sketchup::ConstructionPoint:0xfea8e90 - Point3d(390.368, 111.841, 306.856)...
#Sketchup::ConstructionPoint:0xfea8c38 - Point3d(572.779, 146.892, 306.856)...
#Sketchup::ConstructionPoint:0xfea89e0 - Point3d(493.91, 227.955, 306.856)...
#Sketchup::ConstructionPoint:0xfea8724 - Point3d(408.451, 49.9671, 306.856)...
#Sketchup::ConstructionPoint:0xfea8468 - Point3d(626.566, 186.134, 306.856)...
ERROR!
[Point3d(0, 0, 0), [#Sketchup::ConstructionPoint:0xfea9f70]]
Vector3d(-626.566, -186.134, -306.856)
#Sketchup::ConstructionPoint:0xfea80f8 - Point3d(166.294, 262.562, 306.856)...
#Sketchup::ConstructionPoint:0xfea7e28 - Point3d(446.203, -43.8623, 306.856)...
#Sketchup::ConstructionPoint:0xfea7bd0 - Point3d(55.5756, 257.856, 306.856)...
#Sketchup::ConstructionPoint:0xfea7978 - Point3d(115.356, 141.118, 306.856)...
#Sketchup::ConstructionPoint:0xfea7720 - Point3d(139.372, 141.118, 306.856)...
#Sketchup::ConstructionPoint:0xfea74dc - Point3d(48.0672, 203.288, 306.856)...
#Sketchup::ConstructionPoint:0xfea7284 - Point3d(89.6026, 203.288, 306.856)...
#Sketchup::ConstructionPoint:0xfea702c - Point3d(166.34, 114.827, 306.856)...
#Sketchup::ConstructionPoint:0xfea6de8 - Point3d(356.548, 483.582, 306.856)...
ERROR!
[Point3d(0, 0, 0), [#Sketchup::ConstructionPoint:0xfea9f70]]
Vector3d(-356.548, -483.582, -306.856)
#Sketchup::ConstructionPoint:0xfea6a78 - Point3d(448.291, 280.224, 306.856)...
#Sketchup::ConstructionPoint:0xfea67bc - Point3d(134.428, 325.04, 306.856)...
#Sketchup::ConstructionPoint:0xfea6500 - Point3d(76.403, 431.175, 306.856)...
#Sketchup::ConstructionPoint:0xfea62a8 - Point3d(620.561, 43.6718, 306.856)...
ERROR!
[Point3d(0, 0, 0), [#Sketchup::ConstructionPoint:0xfea9f70]]
Vector3d(-620.561, -43.6718, -306.856)
#Sketchup::ConstructionPoint:0xfea5f38 - Point3d(529.611, -73.3759, 306.856)...
ERROR!
[Point3d(0, 0, 0), [#Sketchup::ConstructionPoint:0xfea9f70]]
Vector3d(-529.611, 73.3759, -306.856)
#Sketchup::ConstructionPoint:0xfea5bc8 - Point3d(547.64, 381.779, 306.856)...
#Sketchup::ConstructionPoint:0xfea590c - Point3d(347.374, 357.812, 306.856)...
#Sketchup::ConstructionPoint:0xfea5650 - Point3d(192.506, 404.667, 306.856)...
#Sketchup::ConstructionPoint:0xfea53f8 - Point3d(292.297, 130.784, 306.856)...`When it detect an error it prints out the return data for raytest and the vector from the ray start point to the hit point.
-
I almost thought it was rays that hit nothing that failed when I looked at this top-down, but then I noticed two rays that crushed that theory.
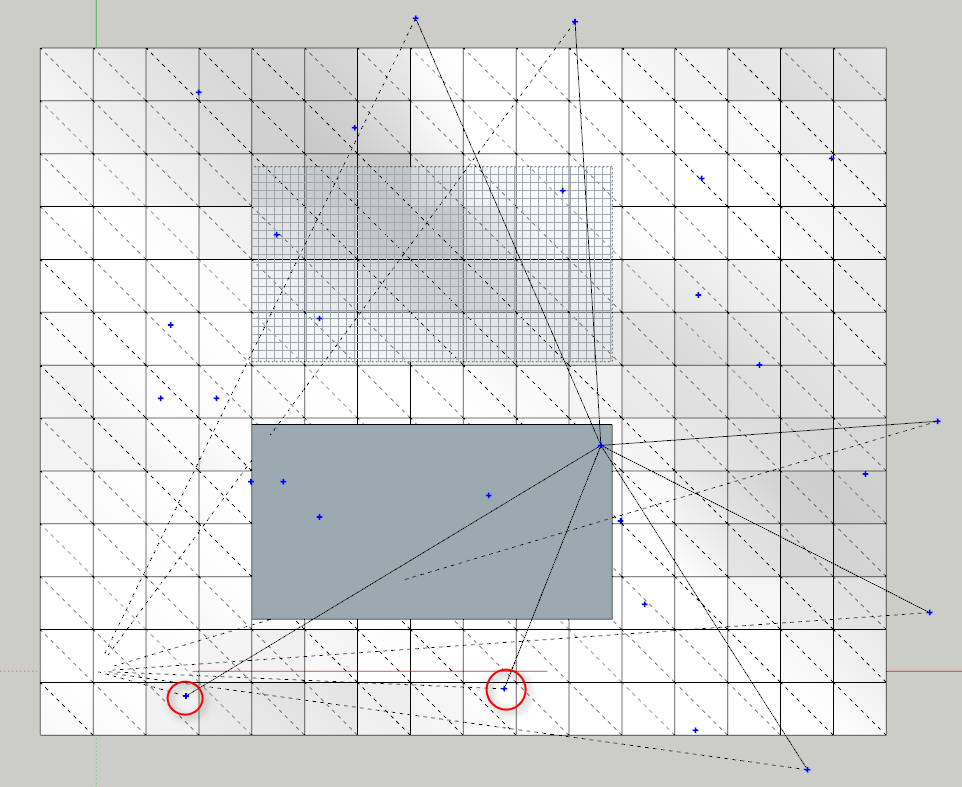
-
hm... It does seem to be of importance if the ray is suppose to hit an entity or not. But there are still deviant results.
The rouge rays that should hit the surface below is causing problems, had it not been for them one could have assumed the junk results where non-hits.
-
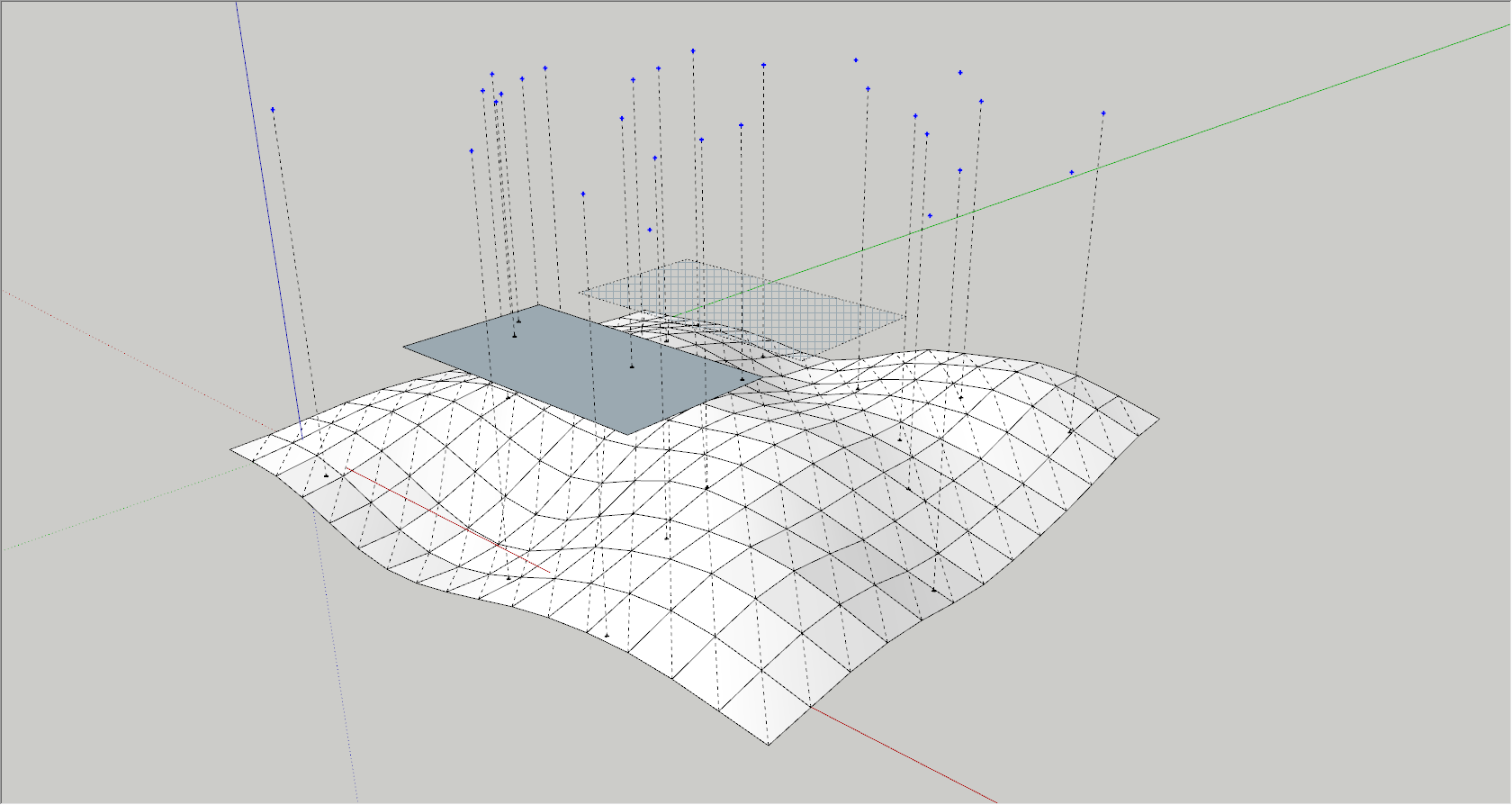
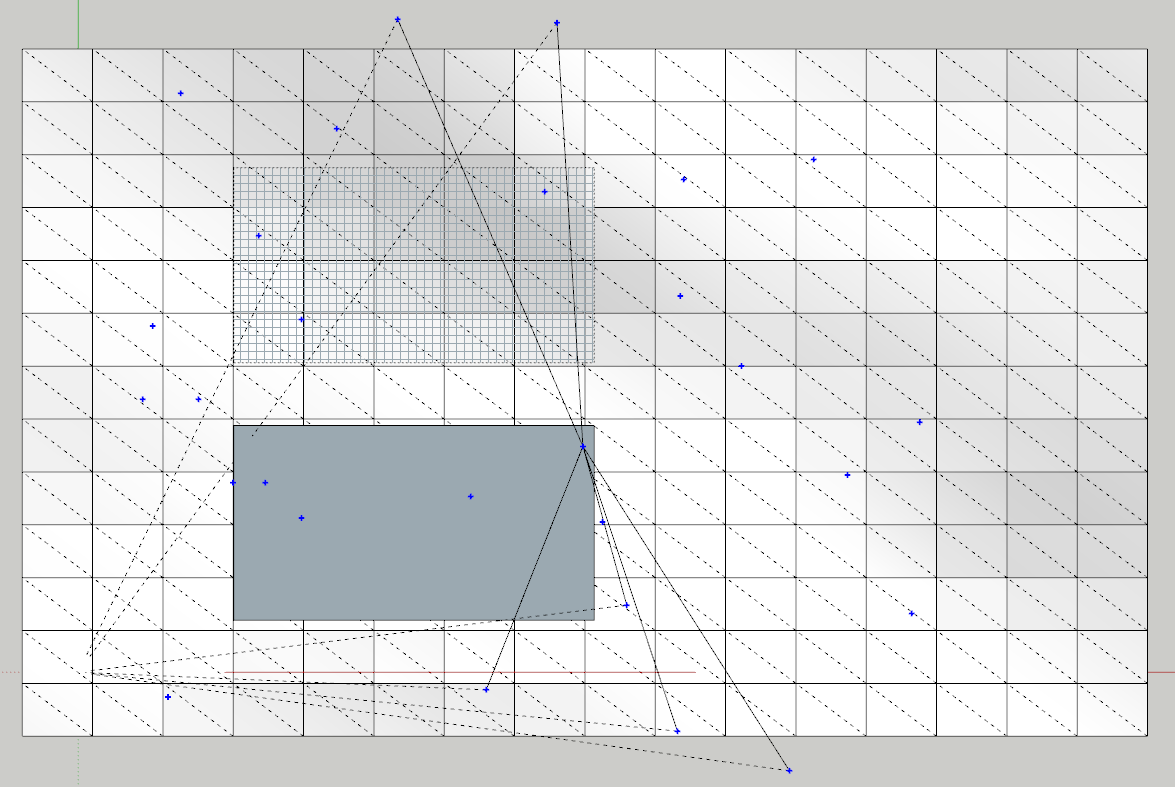
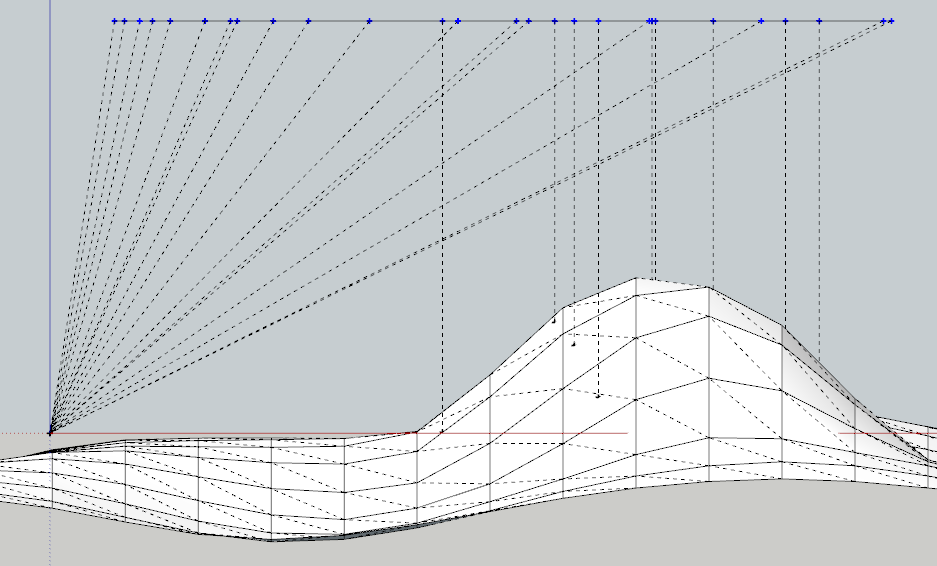
Got it! Looking at if from a fresh angle, literally, it becomes evident what's going on:
model.raytestfails when the ray pass through the Ground LevelExample 1:
Rays that hits entities above Ground Level works correctly, rays that pass through Ground Level returns ORIGIN and a random CPoint as result data.
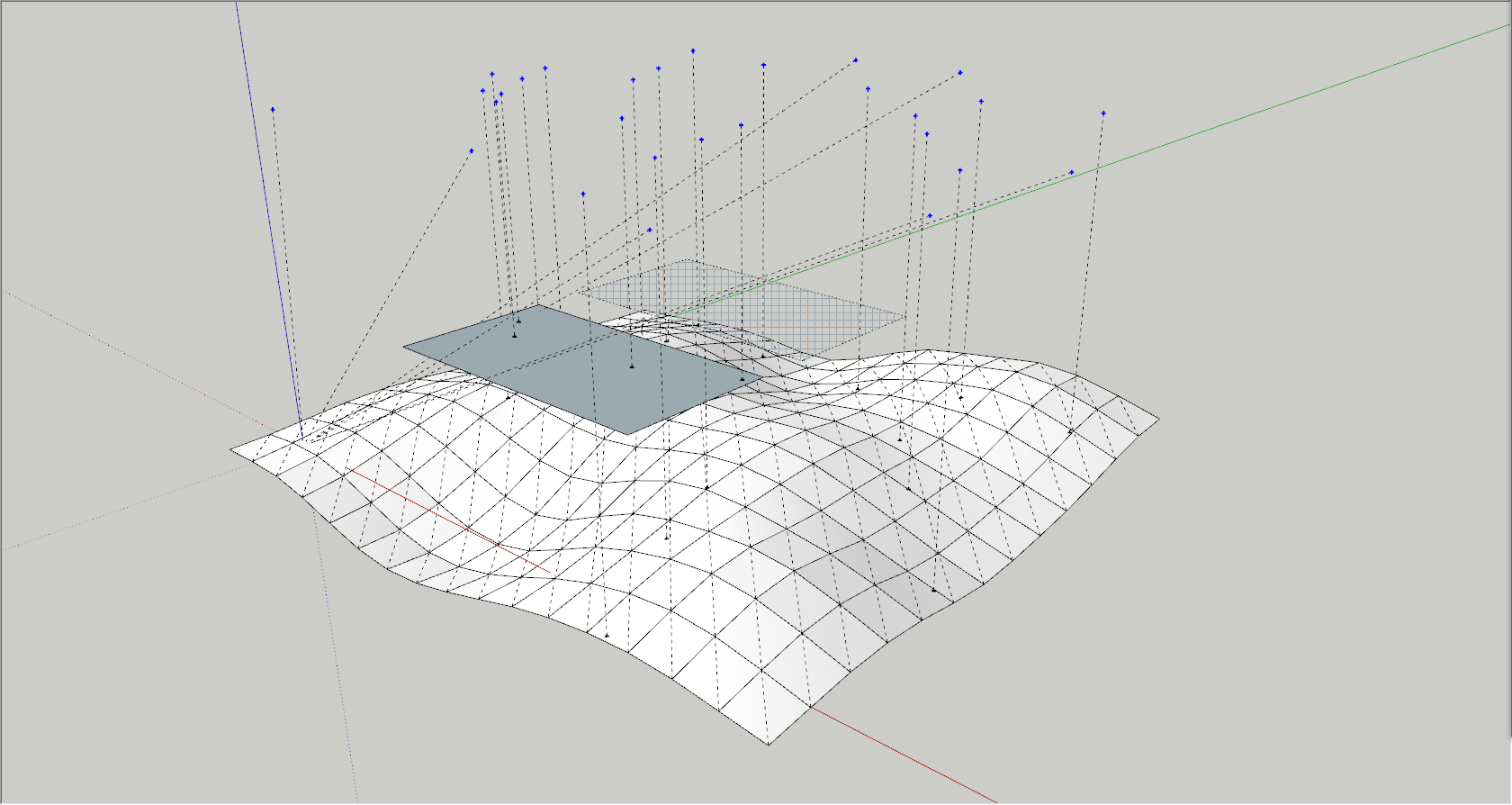
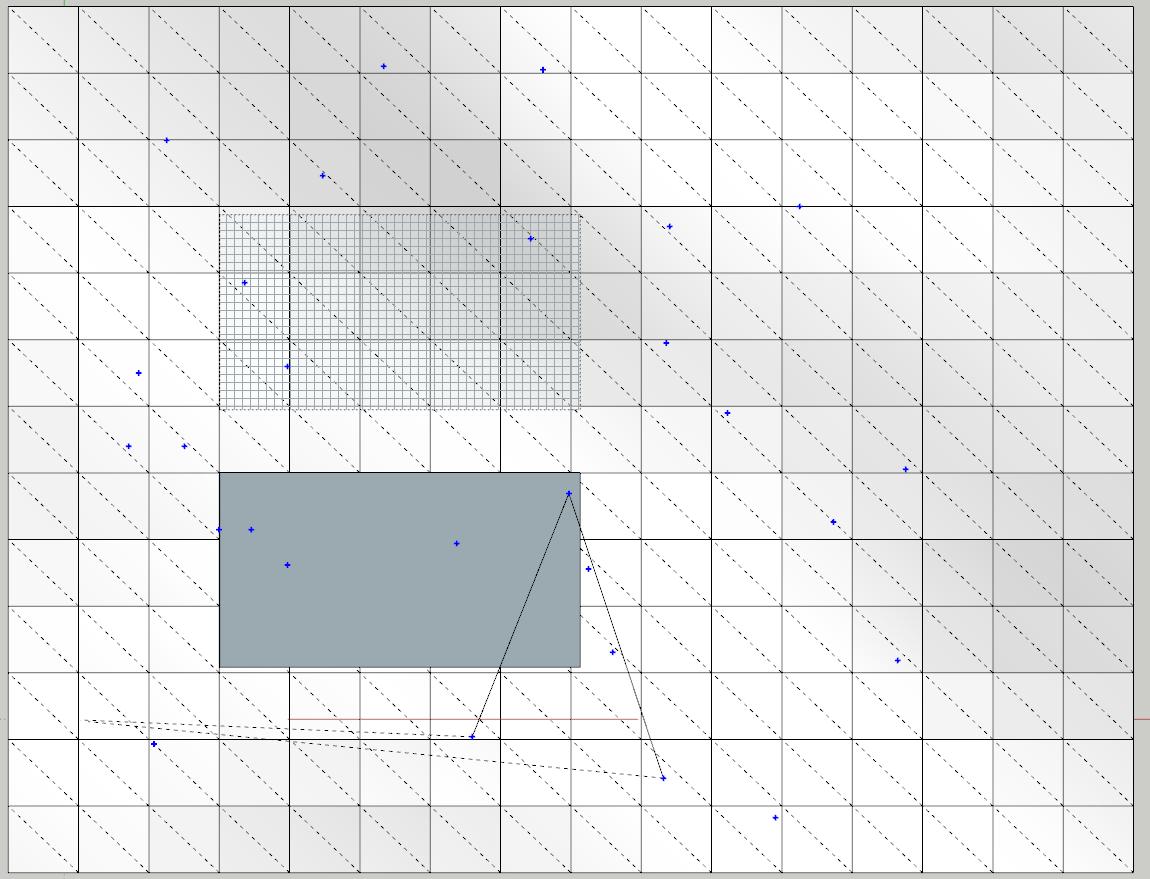
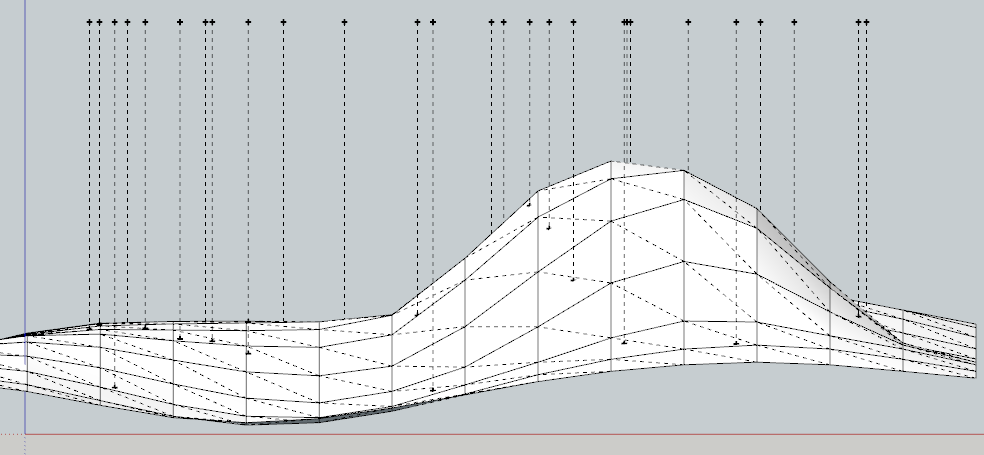
Example 2:
All rays worked correctly because they hit entities without passing trough Ground Level.
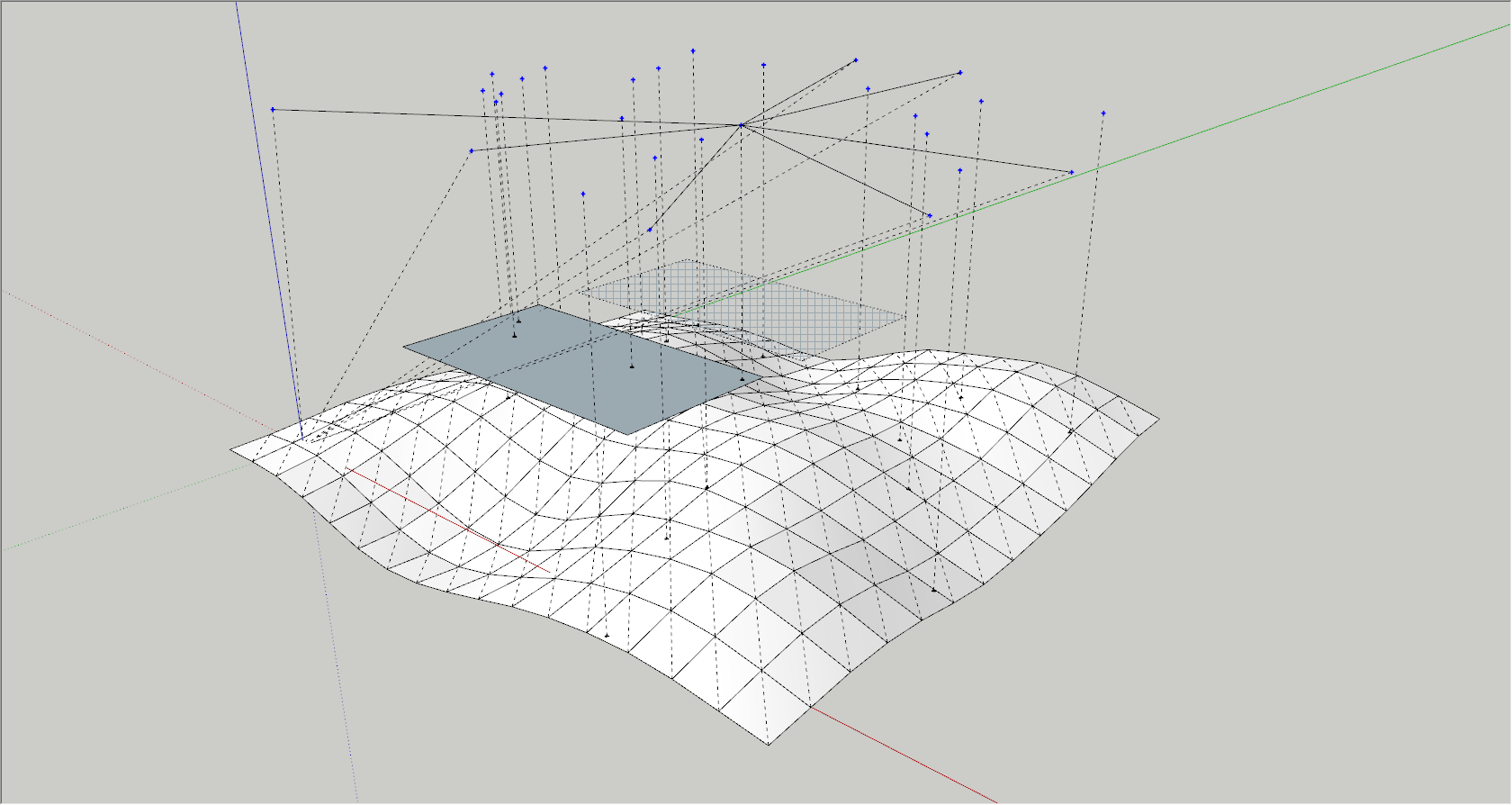
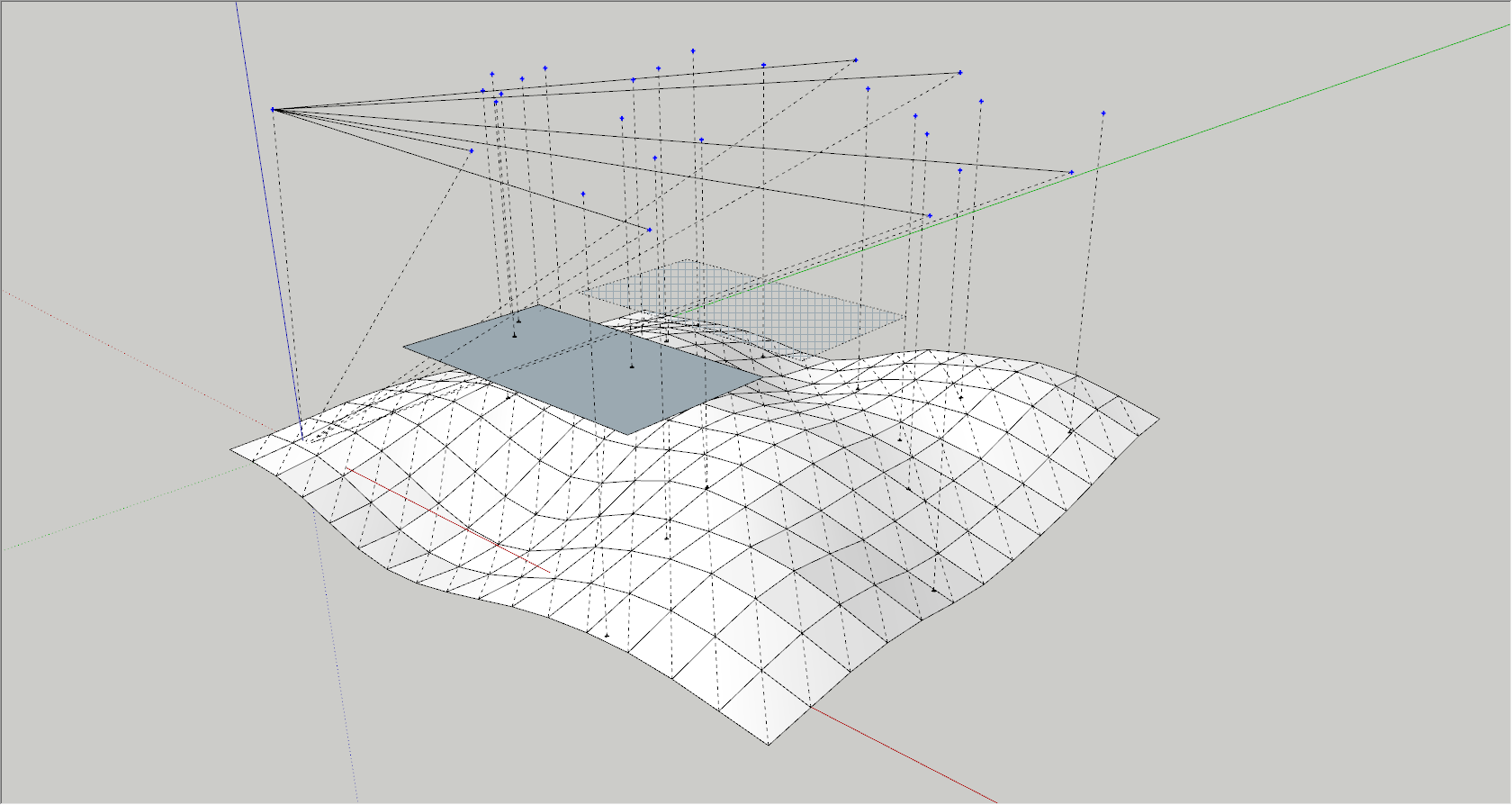
Example 3:
All rays started below Ground Zero, everyone hit because they did not pass Ground Level.
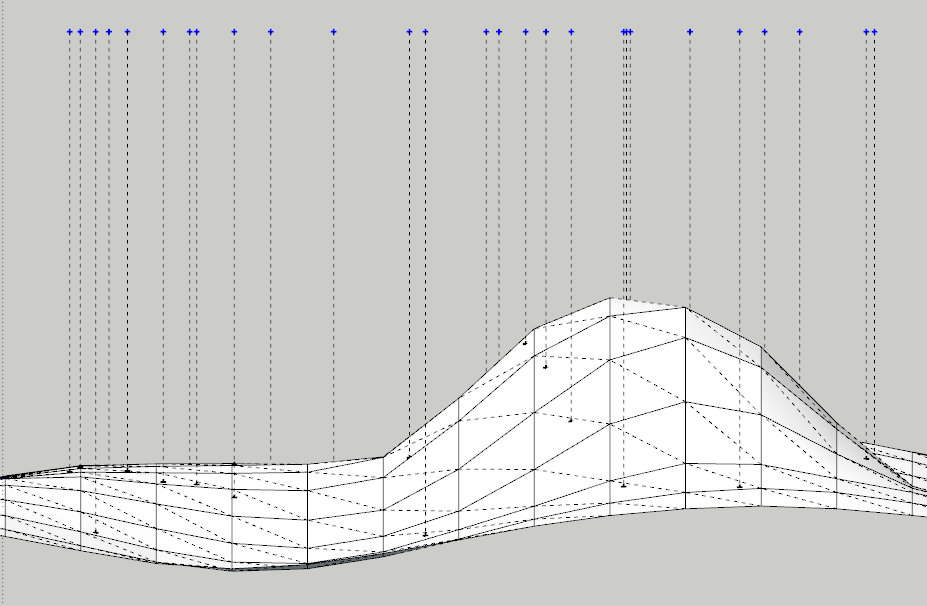
I've only tested rays that go downwards - not sure how things behave for rays in different directions.
It might be possible to write a hack to workaround this. Need to test more cases first. -
Further details:
model.raytestfails when the rays pass through the XY,XZ or YZ plane when there is a CPoint inmodel.active_entities.model = Sketchup.active_model sel = model.selection model.entities.clear! pt = Geom;;Point3d.new( 10, 10, 10 ) puts 'Without CPoints in active_entities;' [X_AXIS, Y_AXIS, Z_AXIS].each { |v| ray = [ pt, v ] p model.raytest( ray ) ray = [ pt, v.reverse ] p model.raytest( ray ) } cp = model.active_entities.add_cpoint( pt ) puts 'With CPoints in active_entities;' [X_AXIS, Y_AXIS, Z_AXIS].each { |v| ray = [ pt, v ] p model.raytest( ray ) ray = [ pt, v.reverse ] p model.raytest( ray ) } puts 'Done'Resulting data:
Without CPoints in active_entities: nil nil nil nil nil nil With CPoints in active_entities: nil [Point3d(0, 0, 0), [#<Sketchup::ConstructionPoint:0x11bc3660>]] nil [Point3d(0, 0, 0), [#<Sketchup::ConstructionPoint:0x11bc3660>]] nil [Point3d(0, 0, 0), [#<Sketchup::ConstructionPoint:0x11bc3660>]] Done -
Implemented a workaround to my TT_Lib2: http://forums.sketchucation.com/viewtopic.php?f=323&t=30503
I've wrapped it up into a Ray class, but you can extract the workaround from the
.testmethod.
-
Thanks Thomas for your efforts! I hope it will be a fix with a high priority.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement