MSPhysics 1.0.3 (16 October 2017)
-
Hi, Anton.
I work on a machine design. As you can see in the attached file, I want to move the pieces. I used the piston and servo. The piston works the way I want it. But I have not been able to rotate all the parts together with the servo. I need your help and your suggestions. Thank you.
-
Hello, Ecati,
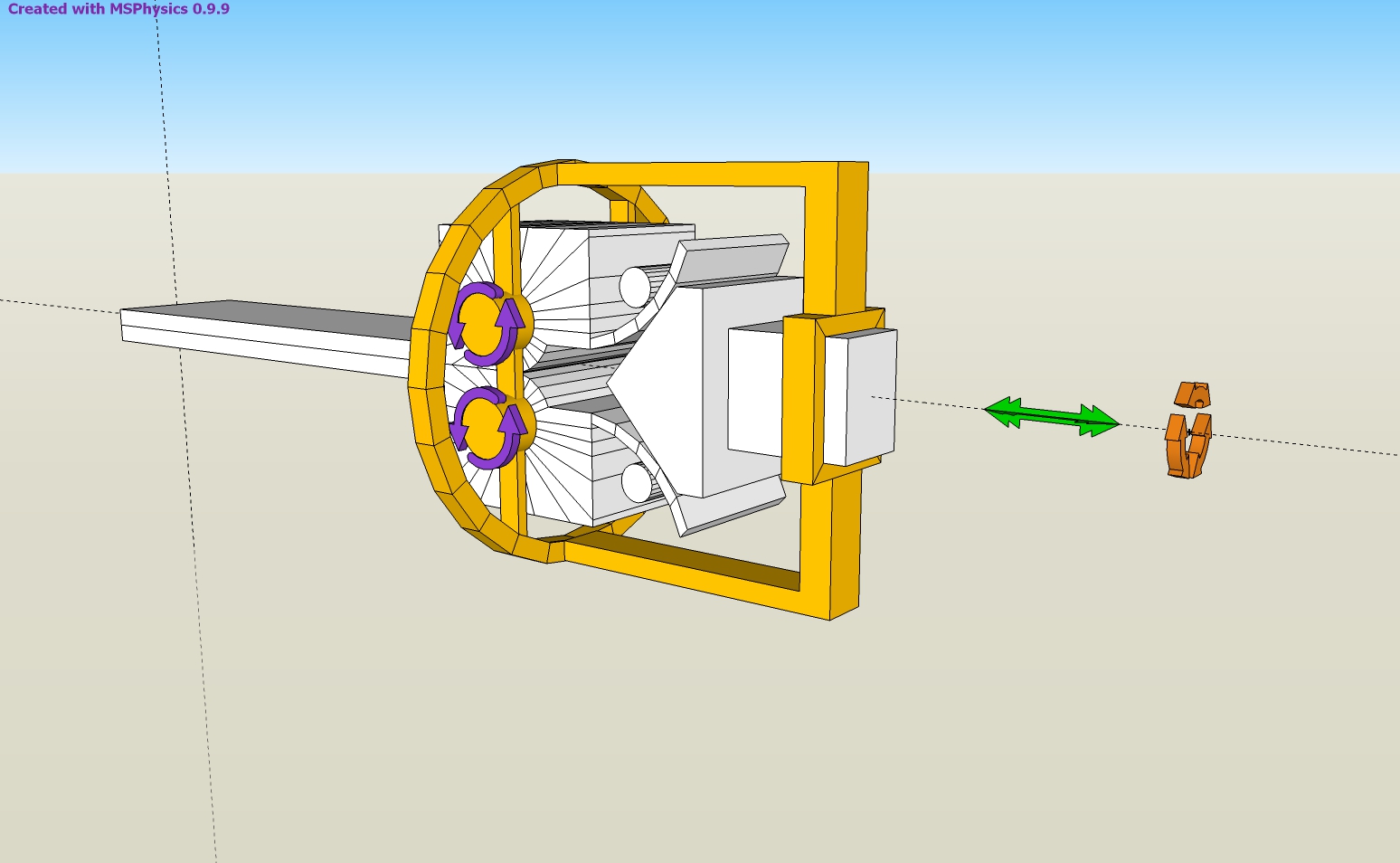
To rotate everything with the servo joint, you have to move the two hinges and the piston inside the yellow, main body group. That way the hinges and the piston will have a parent body, which will allow them to move relative to it. Also, convex decomposition is not necessary there. When a joint, with a specific parent, is connected to a child body, the child body is by default set to be non-collideable with the parent body.
Here is how your model should ultimately be:
makine.skpRegards,
Anton -
Hi, Anton,
First of all thank you very much.
I do not want to bother you with such simple questions. But I have not found a tutorial that will answer my questions. If I'm not wrong, you're preparing a tutorial, are not you?
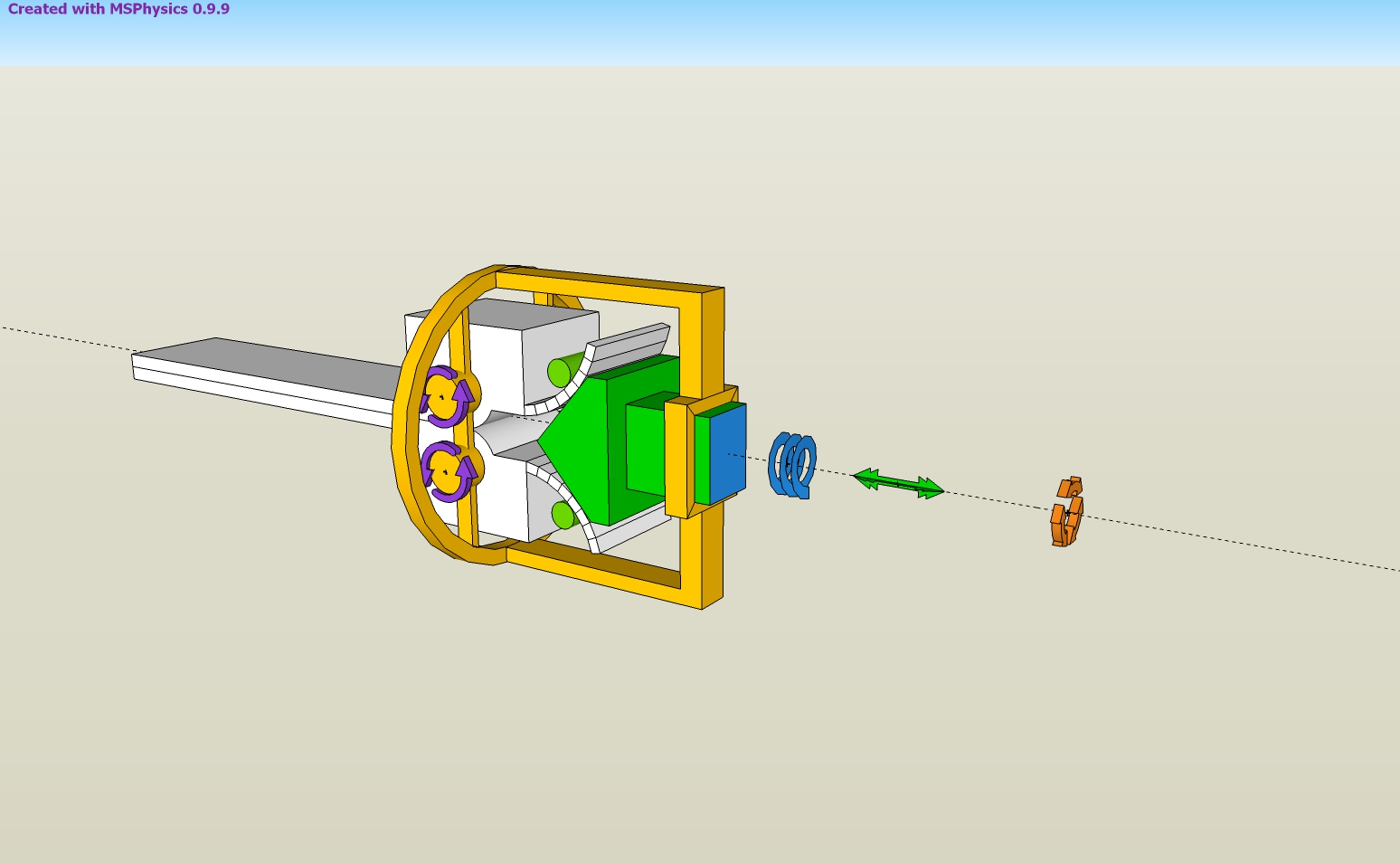
Now, how can I bring the green piston into its original position with a spring after it is pulled out?
Thank you.
-
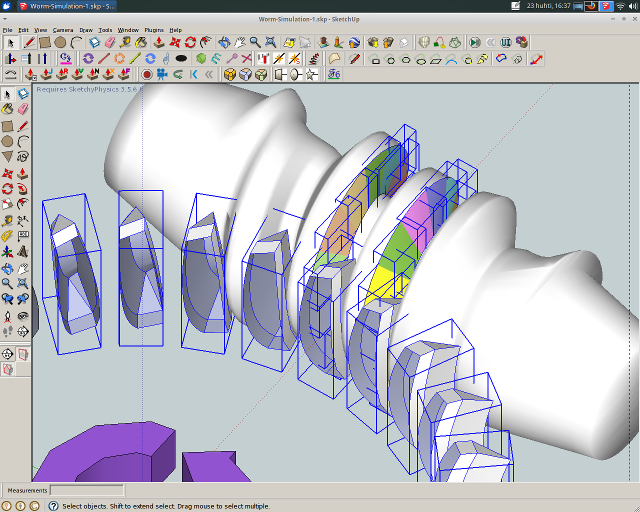
I got the worm gear to do it's work quite nicely (MSPhysics & Sketchy). Just making the collision mesh groups is time consuming. I wonder if there exist possibility for something like in Blender & mesh collision option? The collision frame is not so super exact...
-
@ecati said:
Hi, Anton,
First of all thank you very much.
I do not want to bother you with such simple questions. But I have not found a tutorial that will answer my questions. If I'm not wrong, you're preparing a tutorial, are not you?
Now, how can I bring the green piston into its original position with a spring after it is pulled out?
Thank you.Cut the piston from it's context escape the context then paste in place.
-
Collision problem.
When the first part is moved, it enters into the second part and the third part escapes from the center. How is this prevented?
To see the animation, clik on the picture please.
-
Hi, Ecati,
@ecati said:
I do not want to bother you with such simple questions. But I have not found a tutorial that will answer my questions. If I'm not wrong, you're preparing a tutorial, are not you?
I first need release version 1.0.0. Then I will transition to making tutorials. The tutorials is a bold part on my TODO list.
@ecati said:
Now, how can I bring the green piston into its original position with a spring after it is pulled out?
You can't have the green thing be connected to a piston and the spring at the same time. You can simply tell the piston to move back to its original position by dragging its associated slider controller to its original position. You can as well change the controller of the piston joint to do it with a click of a key, such as
key('f') * 5, so that it moves 5 preset units (millemeters in your case) when key F is held down and back to initial location when the key is released. You can add a negative sign to 5 or in front of the controller for it to move in the opposite direction.@ecati said:
Collision problem.
When the first part is moved, it enters into the second part and the third part escapes from the center. How is this prevented?There must be something in the way. Here is a few potential causes to this:
- Part2 is connected to multiple joints, such as the hinge and the piston. It must be connected to just the hinge.
- Either part2 is pushed out by part3 (if the hinge is not inside part3 or part3 state is not set to non-collidable). Either move hinge inside part3 and set it static or set part3 non-collidable so it doesn't push out part2.
- Another collision outside the shown view is stopping part2.
There could be many reasons. I won't know until I inspect the actual model myself, but the actual cause may very likely denote one of the provided potential causes above.
Regards,
Anton -
Hello, Martin,
@ballbearing said:
I got the worm gear to do it's work quite nicely (MSPhysics & Sketchy). Just making the collision mesh groups is time consuming. I wonder if there exist possibility for something like in Blender & mesh collision option? The collision frame is not so super exact...
Those images show it in SketchyPhysics, but it will work the same in MSPhysics.
So, another way of doing it (in MSPhysics) is by using geared joints:- Set both gears to non-collidable and remove all original joints connecting the gears.
- Add a Piston joint at the location and in the direction of the wormgear and connect it to the wormgear (using the Joint Connection Tool).
- Add a Hinge joint at the center and in the normal direction of the gear and connect it to the gear.
- Using the Joint Connection Tool, connect Piston joint to the Hinge joint to create a geared joint.
- Adjust the gear ratio of the piston-to-hinge gear using the MSPhysics UI.
Make sure you're using MSPhysics toolbars for doing all that...
Regards,
Anton -
Where do we download MSPhysics 1.0.0?
-
@ecati said:
Where do we download MSPhysics 1.0.0?
You could wait [joke ] ?
] ?
The current version is 0.9.9 - and it's latest version is always available from the SketchUcation PluginStore:
http://sketchucation.com/pluginstore?pln=MSPhysics
Like most Plugins/Extensions... -
Hi, ecati,
Sorry, I used a test version for the connect example file.
Anton is working on release version 1.0.0 - which soon comes out. -
Bonjour,
Je voudrais lire la vitesse D'un corps sur l'axe Y interne,no axe Y mondiale !!!
J'ai essayé get_velocity...
set_var("speed_Y",????)Hello,
I would like to read the speed of a body on the internal Y-axis, no Y-axis world!
I tried: get_velocity...
set_var("speed_Y",????) -
Hello, Nicolas,
To get local velocity, along the body's Y-axis, you got to transform the global velocity relative to the body first, then get the Y component:
loc_vel = this.get_velocity.transform(this.get_normal_matrix.inverse) vy = loc_vel.yRegards,
Anton -
Faust, I will ckeck out that cloth thingy soon.
-
Hi, Anton,
first test of a (cloth-) mesh with your MSPhysics API self connect script.
Unfortunately, each node joins only one rod. What am I doing wrong?
-
Okay, faust.
Your script for connecting bodies attempts to connnect multiple bodies to the same joint. That's how it is in the user interface of MSPhysics, but behind the scenes a new joint instance is added for each constraint. So here is the script to have:
onTick { if frame == 1 this.touching_bodies(true).each { |body| next if body.group.name != 'capsule' joint = MSPhysics;;BallAndSocket.new(this.world, this, this.get_matrix, this.group) joint.connect(body) } end }Paste it into one knot, and assign it to all knots, using the Assign Script to All With Name button.
That said, this is a very inefficient way of creating cloth, not to mention that you also have to create faces and then reposition vertices and map the UVs of textures (if any).
I already got my own, more efficient, version of cloth working, like 3 years ago. But it's not perfect. Here is the demo updated and refined for the current version of MSPhysics:
-
Hello ! There is a script or another way that maintains the same distance between objects attached on CurvySlider , as a rollercoaster ? Thank you !
-
Thanks, Anton,
Your code works perfectly. For genuine cloth simulation this is, of course, too cumbersome. For me, it is a good practice to learn a little bit of good script again. In addition, the example shows the almost unlimited possibilities of MSPhysics.

-
Oops, the
get_normal_matrixshould benormal_matrixAlso, to quote other people, use the double-quote button or put them in quote tags surrounded with square brackets. And posting the whole video on the error isn't necessary either. Just post a message that is reported.
-
==============================
To get local velocity, along the body's Y-axis, you got to transform the global velocity relative to the body first, then get the Y component:
CODE: SELECT ALL
loc_vel = this.get_velocity.transform(this.get_normal_matrix.inverse)
vy = loc_vel.yRegards,
Anton===================
problem!!!!!!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement