MSPhysics 1.0.3 (16 October 2017)
-
-
I have a little issue where sometimes when I run the sim (simple hinges) it starts scanning and objects seem to disappear. I can control the camera and see them or half of the object. But it gets worse and worst until I have to reset it. Is there any steps I can take to fix this?
-
INVR, camera clipping is very like caused by some objects falling down too far away from camera. To fix this, find the objects that fall down non stop and draw a floor below them or set them to ignore if they are not necessary for the simulation. These objects could be hidden groups or hidden layers. So uif you unhinde everything, and run simulation, you should be able to notice which objects do that.
-
Testing "export replay to images" in SketchUp 2017.
The result is incomplete images with always the same empty white parts..
The same happens when using the following line in a MSPhysics script:Sketchup.active_model.active_view.write_image("e;/MSPh_Temp/frame_%06d.png" % frame,1600,900,true,1.0)How should it be right for SUp 2017?
-
Hi, Anton. Here I have yet an other question:
It would be great if, for example, there would be a mode for the servos to hold the joint exactly at the center of rotation and completely prevent the centrifugal forces and the pulling out of the components involved.
In the enclosed example, I have not found any way to keep the outer sections of the wings exactly at the center of rotation of the servos. There always develops a gap between the parts.
Have screwed at all settings and nothing was useful.
It seems to be a kind of inertia of the outer wing segments, which can not be stopped by reducing weight, gravitation, friction, etc.
-
Hi Anton, is it possible to control the movement of a servo motor with a function of time. An Excel file ? In the command section can replace the slider by a function of time ( ontick ? ). ... thank you very match.
-
Yes, luckyvac, it is possible to control servo angle through a function of time. There are lots of ways it can be done. One way is to simply write a function into the controller section of the the servo. Say, you want to control the angle of the servo, in degrees, with a function f(t) = t*3 + 150.
Converting it to ruby and MSPhysics, the code would like like this:world.time * 3 + 150. If you paste this snippet into the controller section of a servo, it will have the servo angle be the value of this function at simulation time, t. -
Hello Anton,
Thank you for your reply. I will need more knowledge to carry out my project.
I am guitarist and I teach guitar accompanying songs.
This project aims to realize a tutorial to learn how to play the accompanying guitar and to show that one can realize accompaniments guitar with 5 or 6 rhythmic figures.http://www.luckyanimationspectacle.com/index.asp?pageid=33
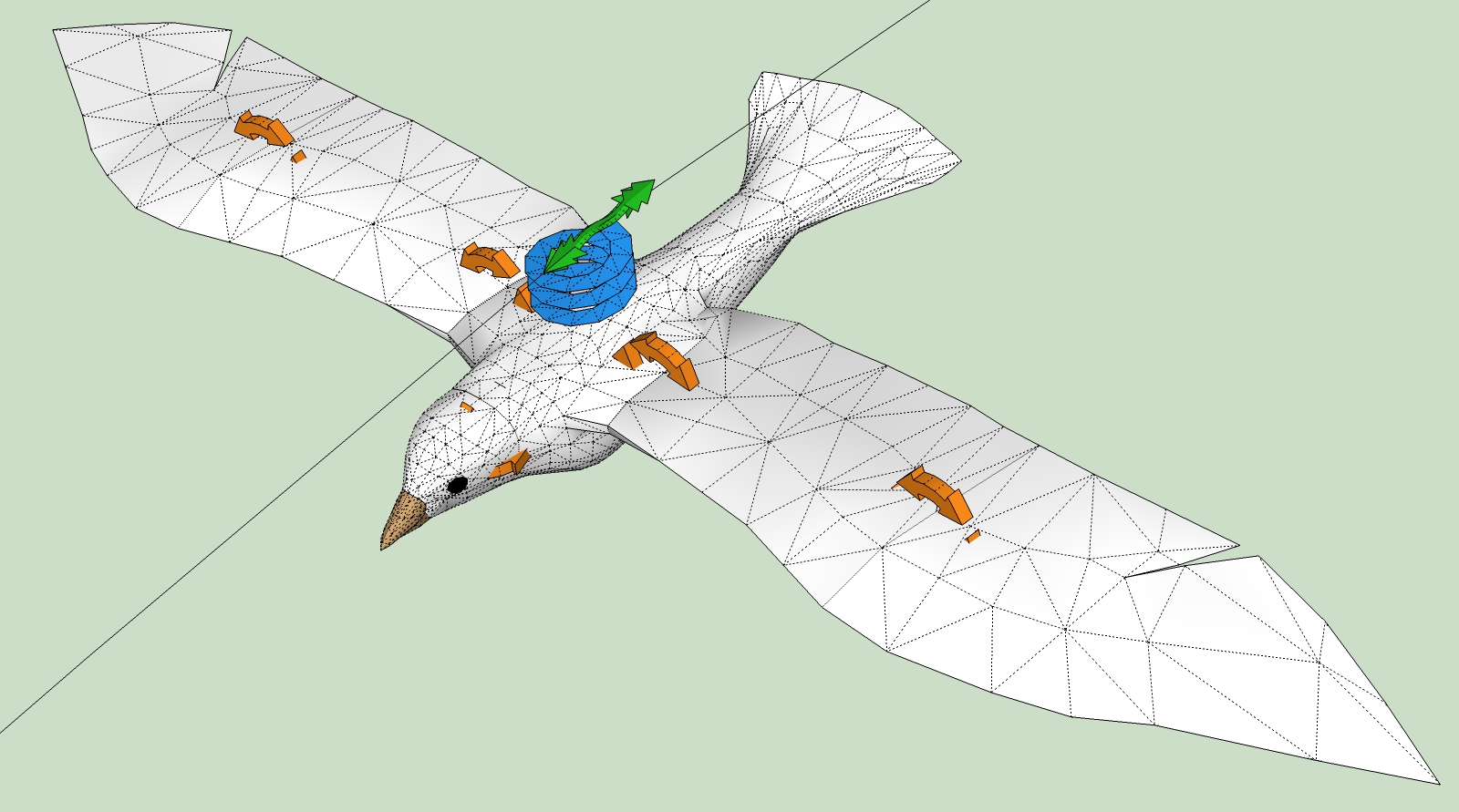
I used MSPhysics to simulate the movement of the arm and hand of a guitarist holding a pick.
He accompanies guitar with a song following the rhythm 1-2-345et.
Fig.01 As an attachment. pierrot robo guitarI used 2 servomotors:
- one for the forearm which operates the up and down of the forearm.
- a second for the descent of the hand.
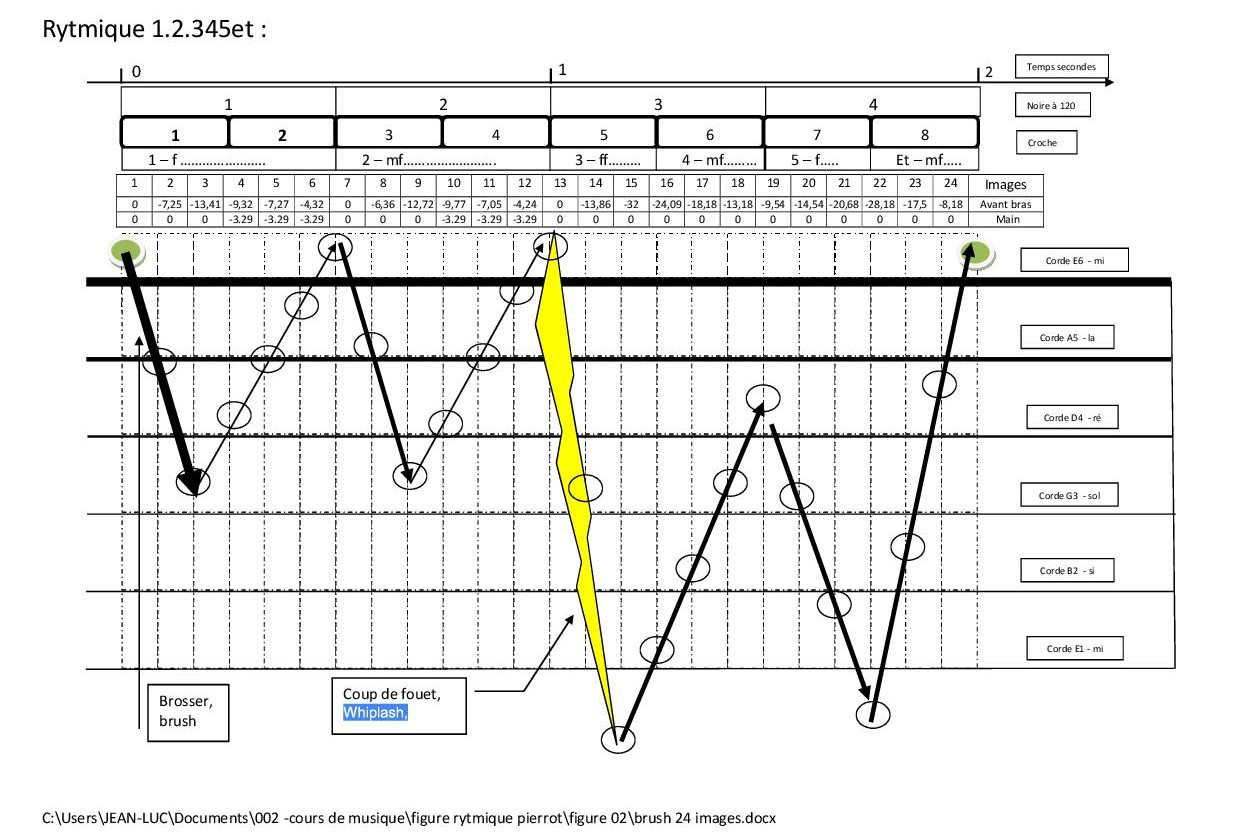
I made a stop-motion video by adjusting the two actuators point by point according to the following diagram:
Fig.02 As an attachment 1-2-345et
I would like to replace the slider by time functions, point by point (FIG. 2) or FFT.
The displacement coordinates of the servomotors are shown in the table in figure 02.
You will find the simulation with the <FOREARM> (avant bras ) and <HAND> (main ) slider in my drive and an example video. I chose the refrain of Bob Dylan's "blowin in the wind".
Here is the link :
https://drive.google.com/open?id=0B00m7nJr8D_qTnRXX3AyeWVyZmc
The video tutorial shows the synchronized movement with a rhythmic tablature made with Guitar Pro MIDI (*.gpx, *.mid ). There is no human, just my voice .
.I thank you for your attention and information you can communicate to me to help me realize my project.
Best regards
jean-luc alias luckyvac... lucky guitaR

-
Anton Awesome Plugin Thanks for the hard work!
I add And not to complain but hopefully to help.
Platform: Sketchup 2017 on Mac 64 bit
Known issues: 1 setting dont get saved in multiple areas for instance in the Joint and Piston Settings: Max and Min wont save always defaults back to -393.7007874, as well as the controller line resets back to default values. Controller name wont transfer over either. In the Servo panel: cannot save custom servo names, Plus Servo Max and MIn wont save either. Just some examples. Hope it helps. -S -
Hello
Problem of direction axes
Xbox ControllerJoystick
 righty) is X-XAXIS position on right stick.???
righty) is X-XAXIS position on right stick.???
Joystick rightx) is axes button LT.????
No axes Y-XAXIS right stick.???please.
-
Great thanks Anton, I wait peacefully while working on other rhythm guitar.

-
Hello, I would like to know how to increase the damping of the servo motor. Thank you
-
Hi, Luckyvac,
Which of the joints are you referring to, a servo or a motor?
To increase the damping of a motor joint, simply select the desired motor joint, open MSPhysics UI, and increase the Damp parameter.
To increase the damping of a servo joint, that is decrease its angular rate, select the desired servo joint, open MSPhysics UI, and decrease the Angular Rate parameter.
Hope this helps,
Anton
-
@luckyvac My appologies for not responding any sooner. I am a bit busy. In short, it's possible to have the servo angle correspond to the table values at time t. The table with angles and times must be converted to a Ruby Hash and then the rest is easy. I will examine your model in depth soon and we'll see what can be done to get the guitar stringing.
@TheSniper Apparently there were a few reports about the dialog options not working properly on Mac OS X and that's not good. I will check it out soon.
@SynSuka3D The
joystickfunction accepts four symbols and each of them correspond to an axis on one of the joysticks:
joystick(:leftx)returns X position on left stick.
joystick(:lefty)returns Y position on left stick.
joystick(:rightx)returns X position on right stick.
joystick(:righty)returns Y position on right stick.The position ranges from -1.0 to 1.0.
Here is the documentation link to the function: http://www.rubydoc.info/github/AntonSynytsia/MSPhysics/MSPhysics/CommonContext#joystick-instance_method
I suggest you explore the MSPhysics scripting documentation for specs and other functions that might be useful, such as
joybutton(button). -
Hi Anton,
Thank you for your advice it works ... but ... I send you the left hand of the guitarist named "Pierrot".
I feel that the system comes into resonance when I connect several servo motors to each other.
What do you think ? How to decrease the resonance ?Merci
have a nice week end.

Lucky guitaR
-
@SynSuka3D Interesting, I will fix this.
-
@anton_s said:
@luckyvac My appologies for not responding any sooner. I am a bit busy. In short, it's possible to have the servo angle correspond to the table values at time t. The table with angles and times must be converted to a Ruby Hash and then the rest is easy. I will examine your model in depth soon and we'll see what can be done to get the guitar stringing.
@TheSniper Apparently there were a few reports about the dialog options not working properly on Mac OS X and that's not good. I will check it out soon.
@SynSuka3D The
joystickfunction accepts four symbols and each of them correspond to an axis on one of the joysticks:
joystick(:leftx)returns X position on left stick.
joystick(:lefty)returns Y position on left stick.
joystick(:rightx)returns X position on right stick.
joystick(:righty)returns Y position on right stick.The position ranges from -1.0 to 1.0.
Here is the documentation link to the function: http://www.rubydoc.info/github/AntonSynytsia/MSPhysics/MSPhysics/CommonContext#joystick-instance_method
I suggest you explore the MSPhysics scripting documentation for specs and other functions that might be useful, such as
joybutton(button).https://youtu.be/b0YBVqUhMdU xbox controller faill script ?
-
Add joystick(:rightz) and joystick(:leftz) for joy(RT) and joy(LT) please.
for xbox controler. -
@synsuka3d said:
Add joystick(:rightz) and joystick(:leftz) for joy(RT) and joy(LT) please.
for xbox controler.Roger that!
-
Hi, SynSuka3D,
I fixed it and added rightz/leftx commands.
You can download the WIP version here: https://drive.google.com/open?id=0B3qg8f4WrNdHUmE5OXNiWjQ0VzgYou can try out the joystick controller test model attached below.
Best regards,
Anton
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement