[Plugin] 2dBoolean ver1.3.1 beta UPDATE 20 dec 2013
-
NO !
Each tested pair of points for an edge just tells us that the related edge must go if they fail on some grounds, or if it the result is just 'iffy' then re-test for the midpoint and if that fails then off the edge goes into theedges2goarray; and when all edges are examined fully you doedges2go.flatten!to remove duplicates [just in case there are any! there shouldn't be] and then useedges2go[0].parent.entities.erase_entities(edges2go)...
-
@unknownuser said:
NO !
Clear enough

Ok, I will continue with this method. You showed me some new moves there I haven't tried.
-
Also why not look at it this alternative way?
You use the original selected group; or if it's an instance then add that to a new group and immediately explode the instance. Now either way you now have a group to use.
Usegroup.entities.intersect_with()using the the group.entities for the results, with a new transformations [0,0,0], and the object to intersect being((face.edges)+face).
Now test all of the group.entities edges for being on the originally selected 'face' as already outlined...
Any lines not on the face get erased.
Now it's possible that some faces in the group might still remain over holes in the face...
To find and remove those examine each face within group.entities [let's called each 'tface'].
Test the following pointpt=tface.bounds.center.project_to_plane(face.plane)
for being on the 'face' [but not in a hole!]... It will fail if it's one of the faces over a 'hole' in 'face' - if so add the tface to a 'faces2go' array.
When all faces are tested usefaces2go[0].parent.entities.erase_entities(faces2go).
Now the last step is to check for any un-faced edges left after these unwanted faces were removed...group.entities.to_a.each{|e|e.erase! if e.class==Sketchup::Edge and not e.faces[1]}...
NOW we should have things sorted ??? -
I have to call it a day. Been at it since morning without any results. Your new approach here give me hope.

I will sleep on it and try this tomorrow.
Thanks for helping me out TIG.
-
My alternative way is a bit simpler.
Here it is reiterated.
Select face and group or instance.
Run tool.
Tool sorts out the parts: one face and one group/instance.
If it's an instance it's grouped and exploded and that group is used.
Now you
tr=Geom::Transformation.new() group.entities.intersect_with(true,tr,group.entities,tr,true,(face.edges+[face]))
You then then collect all of the edges in the group.
Make an array -edges2go=[]
Test each edge in turn.
pts=edge.start.position
then
pte=edge.end.position
againstface.classify_point(pts)etc
If one point is 'on the face' [and not in a hole] AND the other point is 'on the face' [and not in a hole] OR it's on a face's edge OR on a vertex then that edge is OK.
If both of these points are NOT 'on the face' [and not in a hole] AND NOT on a face's edge AND NOT on a face's vertex, then it's
edges2go << edge.
If both points are on one of the face's edges or vertices then it could be either 'on' or 'off' face; so we must test the edge's midpoint (mid=pts.offset(edge.line[1], edge.length/2)) to see if that's 'on the face' [not in a hole] OR on a face's edge OR on a vertex - IF it is any of these then it's OK as it's spanning a convex corner and is all 'on face', otherwise it's off toedges2go << edgeagain, as it's spanning a concave corner - either within a 'hole' or an internal L-shape and falls outside of the face !
You then erase all of these unwanted edges [any connected faces go with them] with
group.entities.erase_entities(ents2go)
There should be no 'stray lines' left by this method and this allows loose unfaced edges to be in the group and remain [trimmed to the face edges if needed]...This simpler idea can then be applied to the main hatching tool tool.
We get the hatch/crosshatch parameters.
We iterate through selected faces in turn.
A new 'hatch' group is made that will become bigger than each face bounds... lines are added to form the hatch/crosshatch [in the plane of the face], all of these lines are then intersected_with the 'face'. Each of the edge's two points are again tested with face.classify_point() [and midpoint if questionable] to make an array of unwanted ones to remove.
-
Wow, TIG! Will be interesting to test your new approach.
BTW:
@unknownuser said:
tr=Geom::Transformation.new()
group.entities.intersect_with(true,tr,group.entities,tr,true,(face.edges+[face]))
You then then collect all of the edges in the group.
Make an array - edges2go=[]
Test each edge in turn.
pts=edge.start.position
then
pte=edge.end.position
against face.classify_point(pts) etcIsent this what I'm doing already? Except (face.edges+[face)] is a group(gp3) for me?
Or did I misunderstand you? Anyway, that may not be of relevance for fixing the problem.I think the main problem is that, after the collection of points "outside" face I have been using if edge.used_by? point to select and erase the edges. Passing on the point as argument. (In reality point gets converted to vertices). That way I can never erase an edge if it's not used by "something".
I guess your way is to tell Sketchup. If point is on edge? Put that edge in the "erase" array. Is that correct?
This all have to be done in an iterator, right? With some conditionals inside the iterator. I spent all day yesterday to find suitable API methods to fit the need, but really need some IF, NOT and OR statements? Or am I wrong here in my assumption?
I guess the iterator will be faster if the statements are made outside..I will try those things and pt=tface.bounds.center.project_to_plane(face.plane) and the edge.midpoint test as well.
Again, thanks a lot!
-
Wait. I think I got it backwards, TIG..
I was looking in the API, and the closest thing to compare an point on edge was, point3d on_line.
What I could see.Then realized, maybe you meant that there should be only 1 iteration, in edge.array?
Iterate through edge.array, do the tests. If true or false(depending on the test) then edges2go << edge ?
After that, erase arrays entitiesedges2go?
Is it something like that what you had in mind, TIG?
-
NO, NO, NO!

When you doface.classify_point(pt)you get ONE of a list of possible results:
http://code.google.com/apis/sketchup/docs/ourdoc/face.html#classify_point
The list is0: Sketchup::Face::PointUnknown (indicates an error),
1: Sketchup::Face::PointInside (point is on the face, not in a hole),
2: Sketchup::Face::PointOnVertex (point touches a vertex),
4: Sketchup::Face::PointOnEdge (point is on an edge),
16: Sketchup::Face::PointOutside (point outside the face or in a hole),
32: Sketchup::Face::PointNotOnPlane (point off the face's plane). So if the result of either of thevertex.positionpoints isSketchup::Face::PointInsidethen it's OK.
If either areSketchup::Face::PointOutsideit has to GO!
If both areSketchup::Face::PointOnVertexORSketchup::Face::PointOnEdgethen it might be OK - you test for the midpoint etc and if it'sSketchup::Face::PointOutsideit has to GO!...
Iterate the edges just once and collect all that fail; then erase them en mass... -
@tig said:
NO, NO, NO!

Tough on your students as all great masters are! I'm just picturing the huge face palm from a steamed but brilliant TIG as he has to constantly communicate with us "less brained" folk.
Seriously, though your patience and constant help is much appreciated. I've been trying to follow both threads with you and Joel going back and forth and I'm starting to pick up a little of what is going on, although it's still all over my head. -
I need my dinner and a drink!
-
@unknownuser said:
NO, NO, NO!
I think I explained the question poorly. SWEnglish at it's worst. Haven't you seen the Swedish chef in the Muppet show?I know about http://code.google.com/apis/sketchup/do%20...%20sify_point Im already using it in the code

The question was. Only 1 iteration?
If you have looked at my code you see that I first collect edge.start, edge.end and edges. THEN I collect the points outside the face. After that I collect edges that are connected to those vertices. So all in all 3 iterators for just 1 purpose.
What I meant about point3d on_line, was that WHEN I was looking at that method in the API I realized I should use 1 iterator, NOT that I should use point 3d on_line. That's a whole different matter
Earthmover wrote:
@unknownuser said:
Seriously, though your patience and constant help is much appreciated.
You bet! I'm deeply greatful.
Therefore Here Ya go!

-
No... try to simplify your code.
I'm trying to suggest a streamlined approach, that both faster and 'easier to get your head around'.
After the intersecting etc... edges will be split by every edge of the face and then these possibly split edges will either fall 'on' the face, 'off' the face, OR with both vertices on the face's perimeters...
Collect all of the edges inside the group.
Check each edge in turn, looking at its two vertices' positions and seeing where they are 'on' the face.
Some edges are clearly 'on' - some are clearly 'off'... from testing a vertex.position in the face.classy_point() method... There are several possible results but careful interpretation will prove VERY useful...
If there are questionable edges [with both vertices on the face's edges or face's vertices] you can check if that edge is 'spanning' a convex or concave corner. If it's 'concave' the midpoint of the edge is not on the face so it has to be erased later on...
So just do the tests as I described... and make an array of 'edge-failures'.
Once you've been through all of the edges in the group you can then erase the array of edge-failures 'en mass'.
Done - the group is trimmed to every perimeter of the face - including its 'holes'.
Because faces need edges they'll also go with the 'removed edges'.
this is much simpler... -
@unknownuser said:
I'm trying to suggest a streamlined approach
I will try to do my best. I think I know now what you mean. If I do it right, I think we will see some speed improvements as well.
Finally time to do some coding, been preoccupied with bunch of boring things today.
Off to work
-
Well I think we are back to par with this method!
And it seams a whole lot faster. Haven't tried on heavy geometry. But It really feels faster.
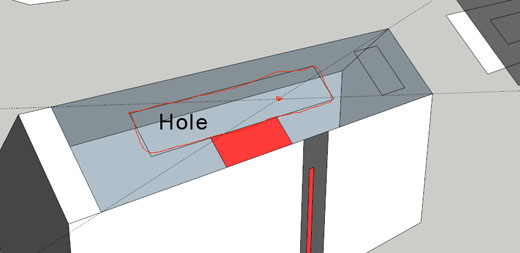
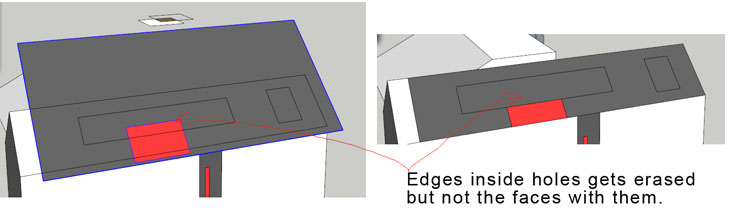
It seams to erase edges as it should be. And on the + side edges inside holes get's erased, which is really good.
Actually point outside is all you need. I don't think there is any need to test on every scenario?
I've set up the iterator like this. Where gp2edge is edge.array and comparefaces are the face to be used in classify point.
Names will get shorter later on. I think it's good when workin on the code to have explaining names..gp2edge.to_a.each{|edge| comparefaces.to_a.each{|face| if face.classify_point(edge.start)==Sketchup;;Face;;PointOutside and face.classify_point(edge.end)==Sketchup;;Face;;PointOutside gp2ptogo << edge end if face.classify_point(edge.start.position.offset(edge.line[1], edge.length/2))==Sketchup;;Face;;PointOutside gp2ptogo << edge end } }Now if we could just get rid of the faces in the holes. I'm gonna try pt=tface.bounds.center.project_to_plane(face.plane) and see what happends....
-
Testing for one of the vertex 'points outside' the face will remove most unwanted edges... BUT imagine this... in a face's hole you have an intersected line drawn across if from one edge to the other, you don't want that line BUT neither of the vertices test 'outside' because they are both on the face's edges or vertices... so they pass... just as if they were the perimeter to the form... BUT my suggestion will find these - test the edge's midpoint for being 'on the face' or on a face's edge if it is then it's NOT in a hole so we keep it [i.e. it's a perimeter edge or a line spanning from one edge to another across the face itself rather than across a hole], but if NOT then it's to be erased as it is spanning over a hole...
You must test for this scenario.
Make a large linear group that will span over a whole face with single lines - without that test they'll all get erased as none of them will have vertices on a face?

 Instead of testing both vertices for every edge test every edge's midpoint [which is easy enough to find!], for being 'on face' [not in a hole] OR 'on edge' OR 'on vertex' - if it passes ANY one of these it's kept, BUT if it passes NONE of these then it goes on the list for erasing at the end - this reduces the number of tests by over a half! It will have noticeable speed improvements and less convoluted checking...
Instead of testing both vertices for every edge test every edge's midpoint [which is easy enough to find!], for being 'on face' [not in a hole] OR 'on edge' OR 'on vertex' - if it passes ANY one of these it's kept, BUT if it passes NONE of these then it goes on the list for erasing at the end - this reduces the number of tests by over a half! It will have noticeable speed improvements and less convoluted checking... -
@unknownuser said:
test the edge's midpoint for being 'on the face' or on a face's edge if it is then it's NOT in a hole so we keep it [i.e. it's a perimeter edge or a line spanning from one edge to another across the face itself rather than across a hole], but if NOT then it's to be erased as it is spanning over a hole...
Yes, this code, no? if face.classify_point(edge.start.position.offset(edge.line[1, edge.length/2))==Sketchup::Face::PointOutside]
I'm working on the face thing now.. If I get that working there should be some serious testing, and then come back and fix things if needed.
And yeah! There are speed increases. I will time it later when doing som more complex geometry.
Thanks for this TIG.
If this will get OK, Hatchfaces would use this intersection as well. Am doing some JS, html tutorials at the same time as coding
-
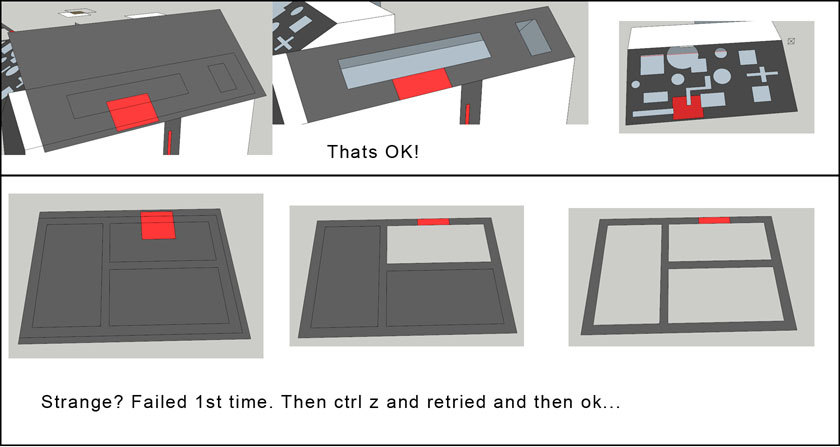
I don't think we can use face.bounds.center as a point in face.classify method. Eg (face.bounds.center.project_to_plane(face.plane))
The center point of a face can be in a hole if the face is surrounding the hole. Hope the pic explains..
(the big face gets erased!)The BIG problem was to erase edges inside holes. Wich you fixed
!!So now when that seams to be working. I'm thinking, recreating the holes a' la face.clone. Then erasing the faces. This would not have been possible before if there where edges inside the hole.
Edited: Hm, since there already are faces in the holes, the new one ends up on top and intersection is needed. Could be difficult to retrieve them for erasing after that.. OR rather, it might be excessive to create the faces just the get hold of them..
-
Please reread my posts, we are not talking about finding the center of any faces OR making any 'face clones'...
Just intersect the group's entities with theface.edges+[face]etc.
Find all of the edges in the intersected group.
Look at each edge...
mid=edge.start.position.offset(edge.line[1],edge.length/2)
Then use
result=face.classify_point(mid)
To see if it's on the face or an edge/vertex - if it's not it's earmarked to go!
Done. -
I have reread your posts, over and over
@unknownuser said:
Just intersect the group's entities with the face.edges+[face] etc.
Find all of the edges in the intersected group.
Look at each edge...
mid=edge.start.position.offset(edge.line[1],edge.length/2)
Then use
result=face.classify_point(mid)
To see if it's on the face or an edge/vertex - if it's not it's earmarked to go!This IS what I'm doing already. Edges are being erased as they should be.
gp2edge.to_a.each{|edge| comparefaces.to_a.each{|face| if face.classify_point(edge.start)==Sketchup;;Face;;PointOutside and face.classify_point(edge.end)==Sketchup;;Face;;PointOutside gp2ptogo << edge end if face.classify_point(edge.start.position.offset(edge.line[1], edge.length/2))==Sketchup;;Face;;PointOutside gp2ptogo << edge end } }The problem is that faces inside holes wont get erased unless we tell'em to.
If you mean to reread your posts to take care of THIS particular problem, I'm sorry did not understand how, by information provided. I'm working at the problem right now, and it should not be as difficult as erasing the edges inside holes.
-
Hmm. This problem I havent got a clue about..
The calculation is irregular. Sometimes it fails to erase the required faces..
I don't know If it's worth killing thyself for.. Most of the times there will be plenty of geometry so this calculation isent needed anyway... But I would like to know why comparison fails and if there are any resque methods for these kinds of failures.








Advertisement