@anton_s said:
Setup:
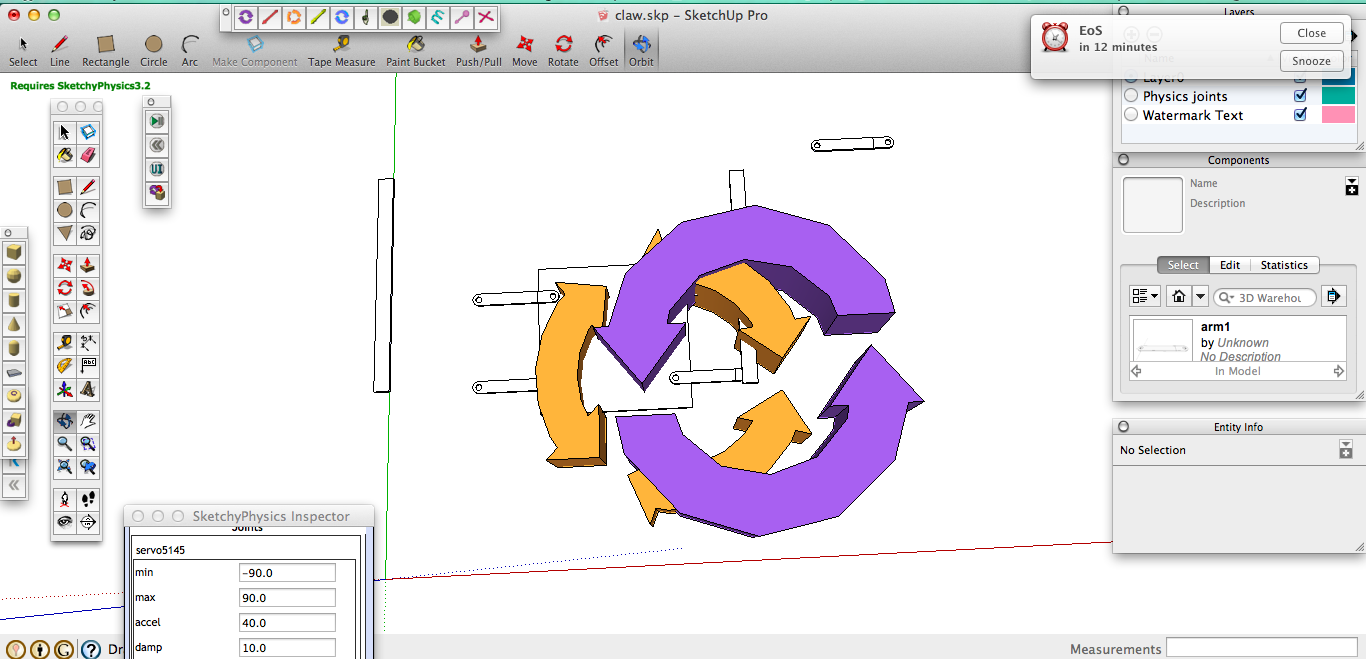
- Your servo must be created within the main body.
- Your hinge must be created within the first arm.
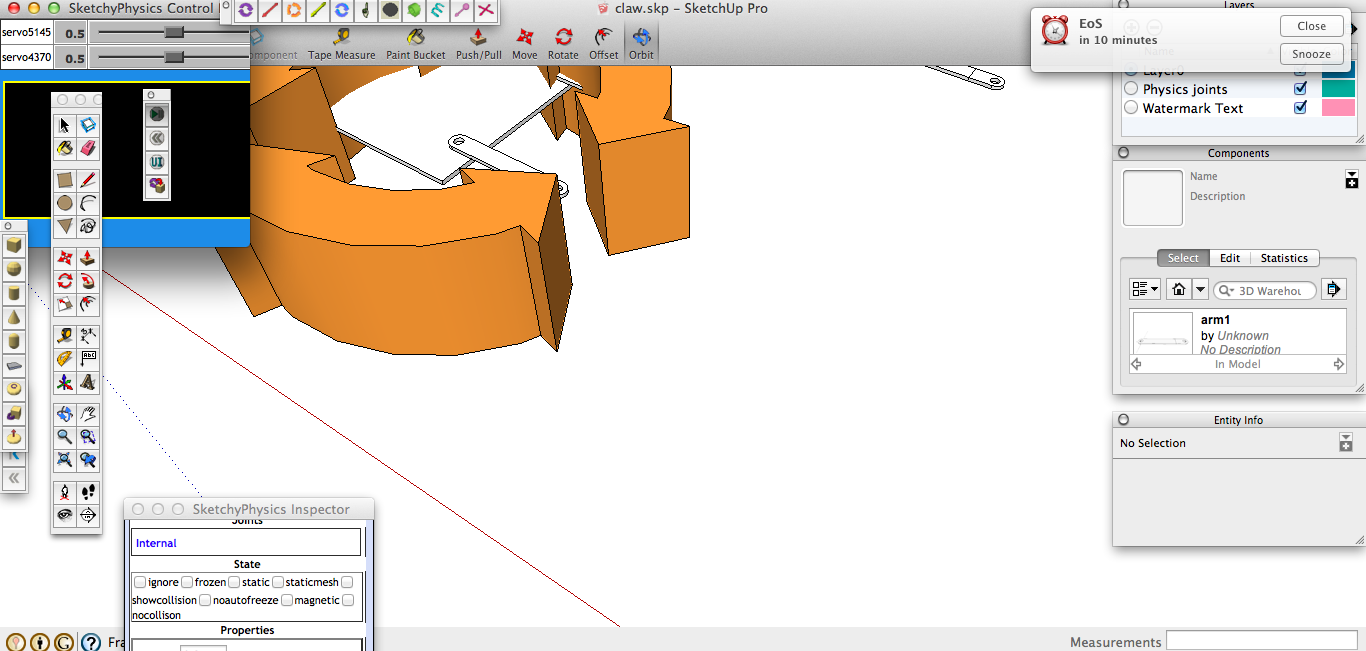
Then use the joint connection tool to:
- Connect servo to the first arm.
- Connect hinge to the second arm.
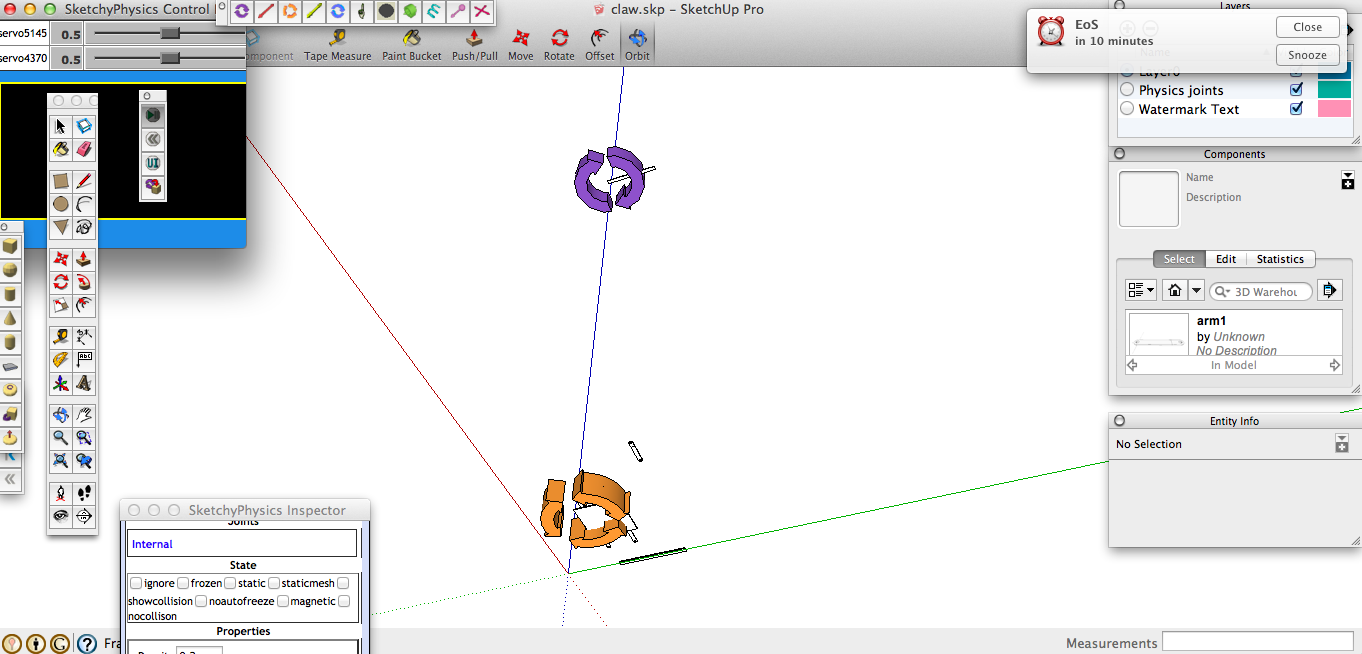
Don't forget to set the main body static. This will prevent it from moving.
If they still don't behave properly then scale up the bodies. It seems your measurements are too small.

If you can't figure out, post the model, i'll fix it.

thank you so much
this has helped me fix my problem!
also, each of the pieces in my model were between 2 and 5 millimetres thick