MSPhysics tests and questions
-
Hello, Zoltan,
Yes, you understood the concept correctly.
For such behavior, however, a script might not be necessary. You can use a Piston or a CurvyPiston joint. When you add a Piston joint, set its position units to m, linear rate to like, 1000, and the controller to,
world.time % 10. This will generate a value b/w 0 and 10 on a timescale of 10 seconds.Also, in case you don't know how to use joints, here is a Wiki:
https://github.com/AntonSynytsia/MSPhysics/wiki/Using-JointsBut if you want a special behavior that would teleport a moving object after it surpasses a scalar of a coordinate, then this is how you do it:
onStart { @max_x = 100.m @start_pos = this.get_position(1) } onUpdate { this.set_velocity(1,0,0) if this.get_position(1).x > @max_x this.set_position(@start_pos) end }Paste this script into the desired moving object(s).
Basically, this will move an object at 1 m/s along the x-axis and teleport it back to start when the objects X coordinate surpasses maximum x position.
You can also, instead, control it by force rather than velocity:
onStart { @max_x = 100.m # in inches; the .m converts it meters to inches. @start_pos = this.get_position(1) @des_vel_x = 1 # in m/s } onUpdate { # Compute the desired acceleration in m/s/s -> (des_vel - cur_vel) / timestep ax = (@des_vel_x - this.get_velocity.x) / simulation.update_timestep # Apply force this.add_force(ax * this.mass, 0, 0) # Teleport if necessart if this.get_position(1).x > @max_x this.set_position(@start_pos) end }Applying forces are better than applying velocities because they don't dissipate any other forces like the force of gravity or the force of contacts. Also, if you don't want to have the object be affected by the gravity, you can, as well, add force to the z component, like
9.801 * this.massor you can simply disable gravity for the object. Both yield the same behavior.But, like I said, to if you want to create moving platform that doesn't involve teleportation, you can add a Piston joint and connect it to the desired object. Then add an oscillator controller to the Piston joint, like
oscillator(50)*100.Regards,
Anton -
I created a floor (static mesh), and a ball and a cube both compounds
I tilted the floor (5)
...Friction ONPlay:
- Ball rolls to the edge of the floor and stops! ?
- Cube does not even move
...Friction OFF
- both roll/slide off the floor and disappear in the abyss
I wait for 10 15 secs,
- the floor's front face disappears so the inside of the floor can be seen,
- and from that face the floor melts away until it reaches the back right corner
- then it melts from the back right corner to the left one and vanishes!
Also if using any SketchUp commands, for example, to realign the scene
then the behavior of objects and mouse pointing and other function go to the abyss of absurdityHope this is helpful.
-
Hi DingBEN,
I guess the ball stops at the edge because its shape is defined as "Compound".
You could test is with a collision shape "Sphere".
When in MSPhysics objects fall down into infinity, they gradually enlarge the overall model.
They are falling too far away from the camera.
And the "clipping" problem known in SketchUp is getting stronger until all objects are optically cut off in the field of view of the camera.
You can read a bit more about the "clipping" issue here:
http://support.google.com/sketchup/bin/ ... swer=36261 -
I posted this same question at the MSPhysics Github. I'm very new to MSPhysics and not very smart either, so I was wondering if anyone has attempted a simulated wind-tunnel or something like that using MSPhysics? Is such a thing even possible at the moment? If so could you share?
-
Wind tests are not possible with MSPhysics. I once came across a plugin dealing with fluid analysis but can't recall the name of it.
-
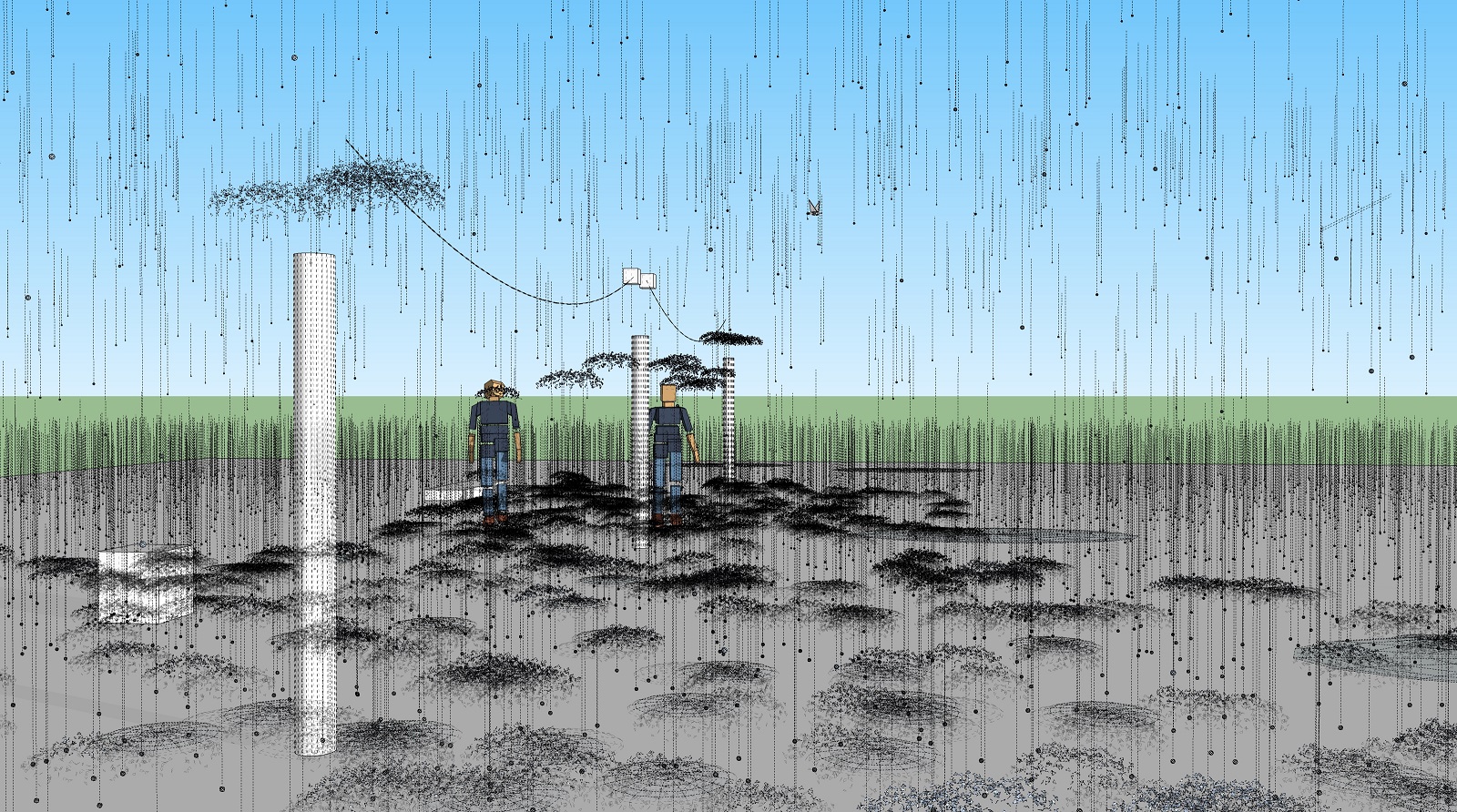
Here the first small test example MSPhysics v1.0.0 with scripted emitters.
Unfortunately, SketchUp crashes completely after a few seconds.
In MSPhysics v1.0.0 WIP7 there was no problem with this.
Thanks in advance.
Edit: Fixed in high Speed - now it works - thanks to Anton!
-
-
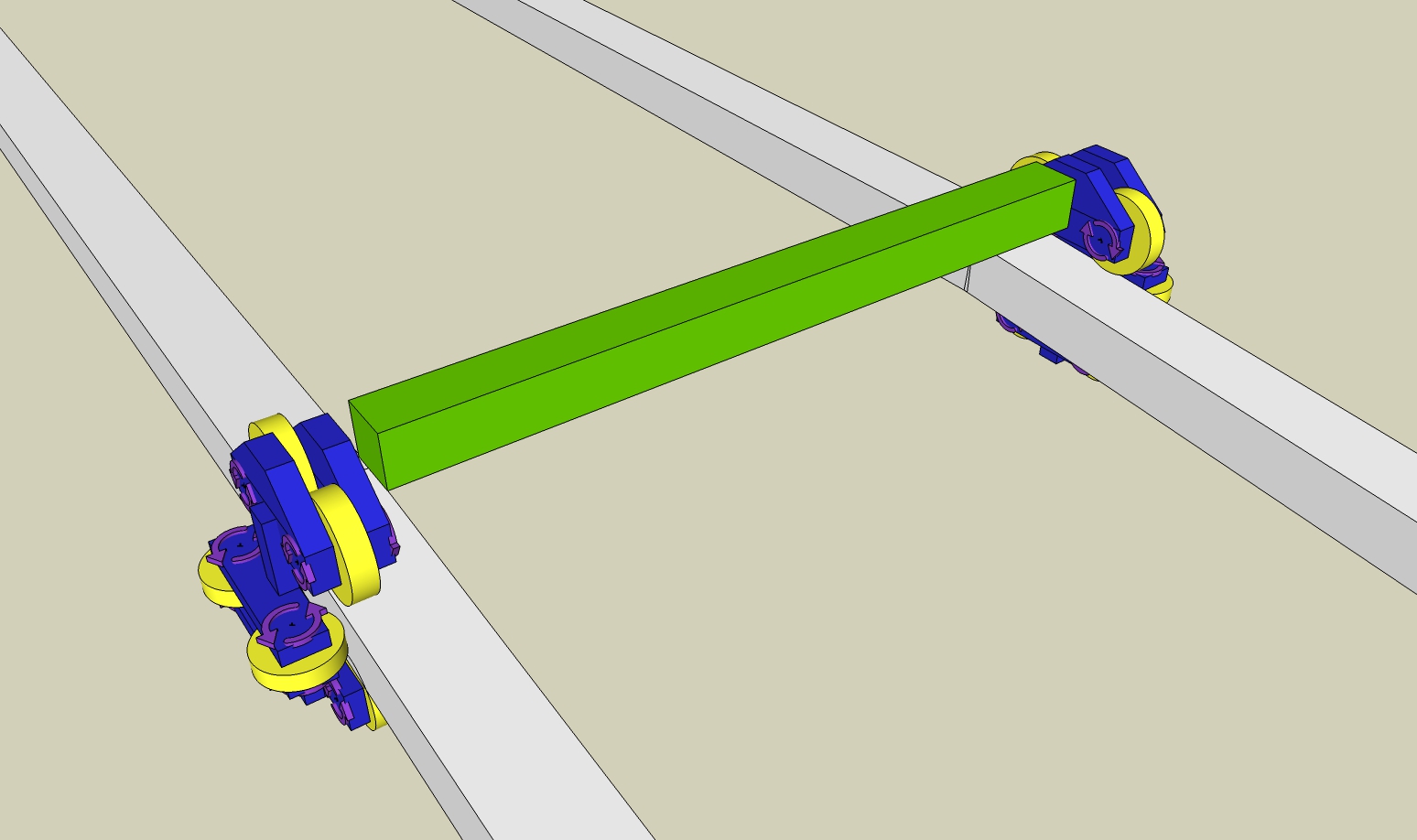
The green piece can be grouped with the blue pieces: ungroup both of the blue pieces, hold CTRL, select the green piece, and regroup them all together.
For improvements you can change the collision of the yellow wheels to Cylinder shape. Also, set the solver model to iterative 16 passes and material thickness to zero.
The only way you will achieve a smooth ride is by relying on the CurvySlider joints and having the entire track set be ignored; relying on contacts will rarely show you good results. Here I attached your model with two CurvySlider joints lining the entire track. I also used Fredo6's Curvyvizard (http://sketchucation.com/forums/viewtopic.php?p=415495#p415495) to smooth the curvy at certain, rough locations.
soru.skp -
Comparison between V0.9.9 and V1.0.1(V1.0.2)
Have the following problems:
- the deep impact of small scripted emitters on heavy bodies.
- strong reflection of that emitted objects (non collision) on a Buoyancy Plane.
- continuous OnTouch events of object with a plane for "waves" and "splashes" don't work anymore.
Here are two files, on for SkechUp 2016 with MSPhysics v0.9.9 witch worked well and the other for SketchUp 2017 with MSPhysics v1.0.1 for witch I need help.
For the parallel tests I hade to install MSP v0.9.9 on SUp 2016 - sorry!
The GIF of V0.9.9 shows what I want to achieve.
Thanks in advance!
OnTouch-Test_01_MSP0.9.9_SUp2016.skp
-
There were a few issues.
In new version, onTouch is triggered only one time, whenever there is a contact between bodies. In your script you tried to use the onTouch event as a repetitive event for generating trailing waves. It did work, as a bug, in version 0.9.9 but not anymore.
Another thing is setting emitted bodies non-collidable. Setting the original bodies non-collidable won't make the emitted body non-collidable. You must appply such state explicitly to the emitted body:
body = simulation.emit_body(...) body.collidable = falseI fixed all these issues and also made rain droplets be independent of touch event.
-
Hi Anton, once again thank you for the quick reply.
This is, of course, an interesting approach and for me something new to explore again.A touch function as a repetitive event for generating something would be great. I think it was a good bug and you should bring it back as separate option. if it is possible...

One problem in the new solution is, that after about 700 frames the lifetime of some emitted objects doesn't end.
-
Hmm... I think something is wrong in code or with MSPhysics. Try changing the rain dproplet's code to this:
onStart { @instances = {} } onTick { dir = this.group.transformation.zaxis dir.length = this.mass point = this.get_position + Geom;;Vector3d.new((rand()-0.5)*1000, (rand()-0.5)*1000, (rand()-0.5)*10) tra = Geom;;Transformation.new(point) rain = simulation.emit_body(this, tra, dir, 5) rain.collidable = false @instances[rain] = true @instances.reject! { |k,v| next true unless k.valid? point = k.get_position(0) if point.z < 0 #k.destroy(true) posineu = Geom;;Point3d.new(point.x, point.y, 5) tra = Geom;;Transformation.new(posineu) body = simulation.emit_body(@@splash2, tra, @@dir, 0.25) body.collidable = false if frame % 3 == 0 posineu = Geom;;Point3d.new(point.x, point.y, -2) tra = Geom;;Transformation.new(posineu) body = simulation.emit_body(@@bubble2, tra, @@dir, 0.2) body.collidable = false end next true end false } }Aside from that, you can use onTouching event for repetitive action, but it only yields toucher parameter and doesn't provide touch position.
-
Without the k.destroy function it works better now. Thanks, Anton.
Controlling the disappearance of the drops by setting the lifetime is sufficient...
I have meanwhile found a way to make the marine life's bow wave smooth on the surface of the water, even if it slopes sideways.
More complicated is it, when objects are jumping out of the water, when diving or with falling ice floes causing the appropriate waves and splashes, which was very easy with the good old V0.9.9 bug function.
The gif-example is old, but shows what I mean.
Witch toucher parameters can I use from an onTouching event to get recurring waves and splashes during prolonged movement of objects in the water?
-
You can rely on MSPhysics::Body.#contacts function. Add this code to an iceberg to see the effect:
onTick { if this.get_velocity.length > 1.0 && frame % 10 == 0 this.contacts(true).each { |contact| body = simulation.emit_body(@@splash4, contact.point, @@dir, 0.4) body.collidable = false } end } -
The script works in this form good for a few objects. The falling pieces of an iceberg touch each other and produce emitting objects everywhere in the air in mass. SketchUp crashes then ... It would be good if I could use instead of .each a certain surface for the contact. Another problem is that all splashes are created simultaneously. Therefore a script for a random time point of emitting would be very helpful. I'll try this...
-
After I have tried several things and have not come to any satisfactory result, I have a suggestion:
It would be great to have a kind of "Penetration Joint" or function (onPenetration):
to connect it to one or more noncollidable objects (or faces).
The properties of objects that penetrate this noncollidable object are to be evaluated continuously:
name, mass, velocity, position of the touch/penetration, direction of movement, etc..
In other words, please bring back the old onTouch bug as an independent function! -
I finally found a satisfactory solution for my imitated water fun in MSPhysics v1.0.2:
A combination of a surface with onTouch function (water surface) and an evaluation of velocity.lenght (onTouching event) and contact.points of in the area of this surface moving objects.
Anton, thank you for the examples, hints and help!
-
Hi Anton,
I want to bring more variation into the particles of the orca's breathing air. My intended scaling function does not show any reaction. What can be the cause? Can't scripted emitted objects not be scaled during simulation?for i in 1..20 do tra = this.group.transformation dir_zsf = tra.zaxis dir_zsf.length = 290 + rand(100) fount_p = Geom;;Point3d.new(0.0 + rand(-5..5), 2.9.m + rand(20), 0.5.m + rand(15)) # y-pos of fountain point = fount_p.transform(tra) transl = Geom;;Transformation.new(point) scalin = Geom;;Transformation.scaling point, rand(1..5) transf = scalin * transl if point.z > 0.1.m body = simulation.emit_body(@@splashF, transf, dir_zsf, 0.2) body.collidable = false end end
-
The next step is to find a solution to bridge the gaps that arise between the moving parts of the objects at the pivot points.
I think of flexible triangular or square surfaces, which I can clamp between the boundary lines of the moving parts. For this I have to immerse deeper into the Ruby programming of SketchUp geometry ...
If someone from the experts has ideas, I would be very happy.

-
Hello Anton, here an other little question:
When I let run "Replay" with active hidden geometry all emitted objects remain in there last position still after there lifetime. Is this normal? Could that explain why Twilight takes longer and longer to render the images during the simulation?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement