MSPhysics 1.0.3 (16 October 2017)
-
-
hey guys im commenting in 2022.. i know i know im the only one.. but ive tried using this legendary tool and the controller for shortcut keys in keyboard doesnt seem to respond when simulating..
-
First of all, thank you so much for your creative ruby.
I've been working on my projects using sketchup and this ruby.
I made objects out of a sudden idea.
I just gave the created object 6 hinge joints and all objects were given the steel attribute.
And the result is a surprisingly non-stop rotating structure.
I have a question.
I wonder if it's okay to actually build this structure.
How different is the simulation result of Ruby you created from the physical phenomena in the real world?
Sorry for asking the question using a translator. -
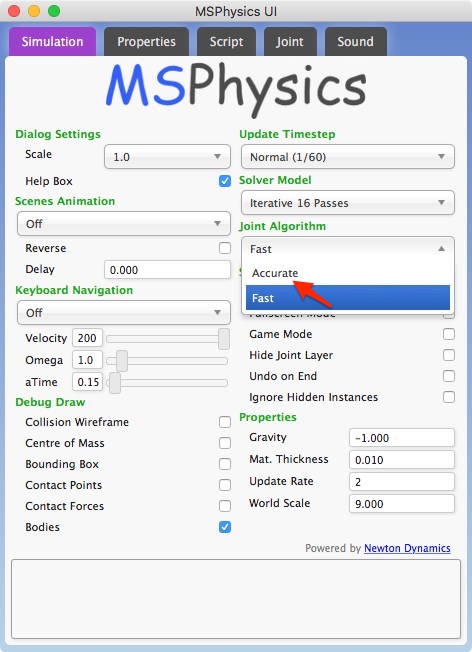
I can not use »accurate« in the Joint Algorithm in all models with MSPhysics (Skp Make 2017 on Mac). Thanks for all help by user ecati. He sended me a runnig model. But I have to switch first from »accurate« to »fast.«
When I build my own model with »fast«, the flap will be nervous. The nervousity increases until the flap flies through the air.
What can I do, that Joint Algorithm »accurate« does not crash my Sketchup Make 2017 on Mac? -
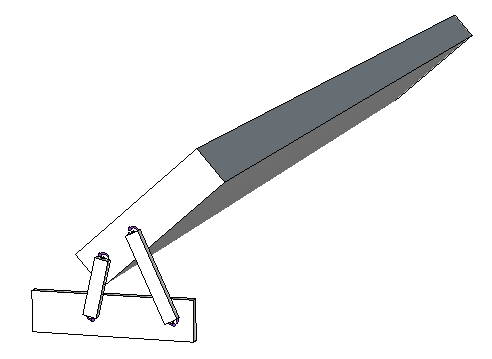
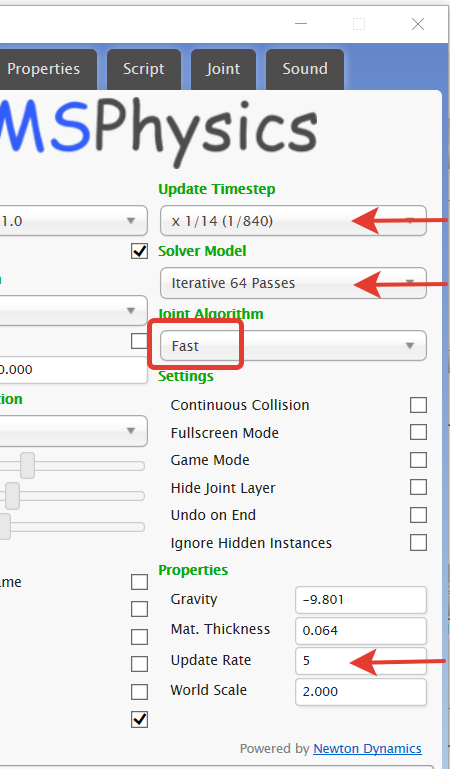
My new modell with 7 hinges and 1 servo. Goal: the flap shall stand upright 90 degrees.
In the preferences I can not choose »accurate« for the Joint Algorithm. If so, my Sketchup Make 2017 on Mac crashes.
Which mistakes are in my model, which I could not find?
When I start MSPhysics and use the slider, the flap rattles. Please: Can someone save this model with Joint Algorithm as »accurate«. When I get such a model, change from »accurate« to »fast«, the model will run good. That is my experience.
Flap upright with 2 x 4 hinges (1 servo)
Flap upright with 2 x 4 hinges (1 servo)

-
 Klappe_MSPhysics_gut6.skp
Klappe_MSPhysics_gut6.skp
@n lindenthal said:Oh, thank you, yes, this is, what I want.
In my tests the moving parts allways were restless unsteady.
What did you set in the MSPhysics settings??Sorry, now I see your model.
… and I opened it with SketchUp Make 2017 and MSPhysics 1.0.3When I toggle start, the shorter bone falls down and also more parts beginn to be restless.
How did you get the restfull moving in your little film?
How can I look for the differences between yours and my model?
Thank you, that you gave me back my trust, that MSPhysics will move my model!!
Why my Flap with 4 Hinged Corners is so difficult?
What I have to set changed, that my Flap does unfold without trash around?As soon as I change the algorithm from Fast to Accurate, Sketchup Make 2017 crashes/freezes.
My flap is 1800 mm long and trashes around. When I make it short (only 10 mm), it does not trash. What are the appropriate settings?
-
-
I can run my model on iPad with SketchUp Viewer (= SketchUp from Appstore without payment = Viewer).
Can MSPhysics also run on iPad with SketchUp Viewer? -
It does not work on the 2022 version. Do you have any alternative?
-
What to do if controllers disappear from runtime control panel? Restarted simulation a dozen of times, no luck. Removed and replaced controller and restarted, nope. They're gone.
And, by the way, how to remove/tune transparency of runtime control panel? -
Hello,
I'm installing MSPhysics on a Windows 10 PC with Sketchup Pro 2022.
When I open SU I receive a series of errors and the extension isn't available even though it shows up in the Extension Manager. See the attached PDF with the errors.Thanks for any help I can get.
Ron
-
@ronagoldberg said:
Hello,
I'm installing MSPhysics on a Windows 10 PC with Sketchup Pro 2022.Thanks for any help I can get.
Ron
MS Physics doesn't work in versions later than 2017. the author needs to make updates but they have not done it yet. Basically you can't use it with SU2022.
-
Hello Anton or Anyone who could explain me for the problem.
I've use SketchUp 2017 for long time together with MSPhysics (right now is version 1.0.3).
They worked well and thank you very much to Anton that create a super good extension.But suddenly, the models that I using with MSPhysics has problems on running scripts that has user interaction such as using keys and mouse buttons. Everytime I run the script, it pop a window like shown here.

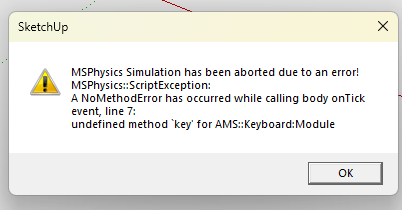
I've test the script from the learning model that I found.
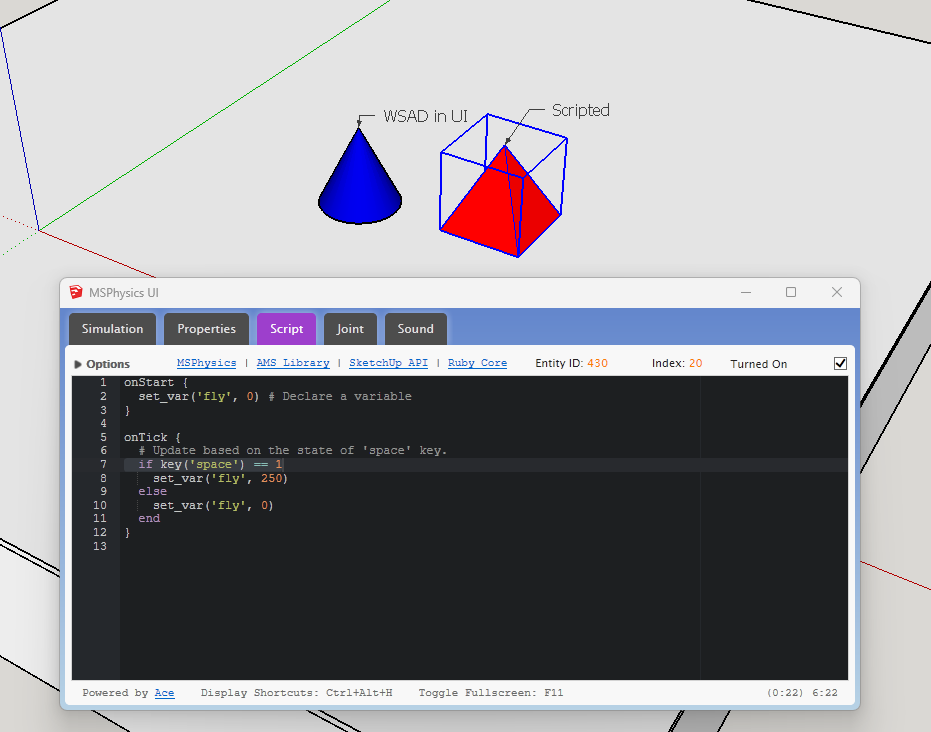
It happens also in the model that require W , S , D , A , arrows and all mouse buttons.
But mouse's wheel can be used. -
Hello Anton,
I would like to know if I can consider a density of 7800kg per m3 for a <servo motor cylinder> group not reacting to "by mass" "by density" Mass Control of UI.
THANK YOU
Jean-Luc -
Is there any news on MSPhysics being updated for newer versions of SketchUp?
I would like to offer to help with work getting it updated. I wrote the infamous plugin sph4bar in 2006 which models spherical 4 bar mechanisms. I also wrote GeoSketch, a plugin used by aerospace companies.
In a previous life, I worked for Cadsi, and integrated DADS (Dynamic Analysis and Design System) in to CAD systems such as CATIA and Ideas Master Series.
Now I am retired and have time to kill.
-
Will this work with SketchUp 2024?
-
@a4jp-com said in MSPhysics 1.0.3 (16 October 2017):
Will this work with SketchUp 2024?
No. If you read this thread you'll see the last version it worked with is 2017.
-
Know any others like this that work?
-
@a4jp-com Nope. I think this is a one of a kind.
-
@spring-freediver said in MSPhysics 1.0.3 (16 October 2017):
Is there any news on MSPhysics being updated for newer versions of SketchUp?
I would like to offer to help with work getting it updated. I wrote the infamous plugin sph4bar in 2006 which models spherical 4 bar mechanisms. I also wrote GeoSketch, a plugin used by aerospace companies.
In a previous life, I worked for Cadsi, and integrated DADS (Dynamic Analysis and Design System) in to CAD systems such as CATIA and Ideas Master Series.
Now I am retired and have time to kill.
Hi. That would be amazing! How are there not enough SU tools to help check the operability of moving elements, that is, kinematics.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement