MSPhysics 1.0.3 (16 October 2017)
-
Still dead on my end. It's like it partially locks up. Once I click the play button it starts acting weird. When I try to push things around all it does is try and draw a selection box.
-
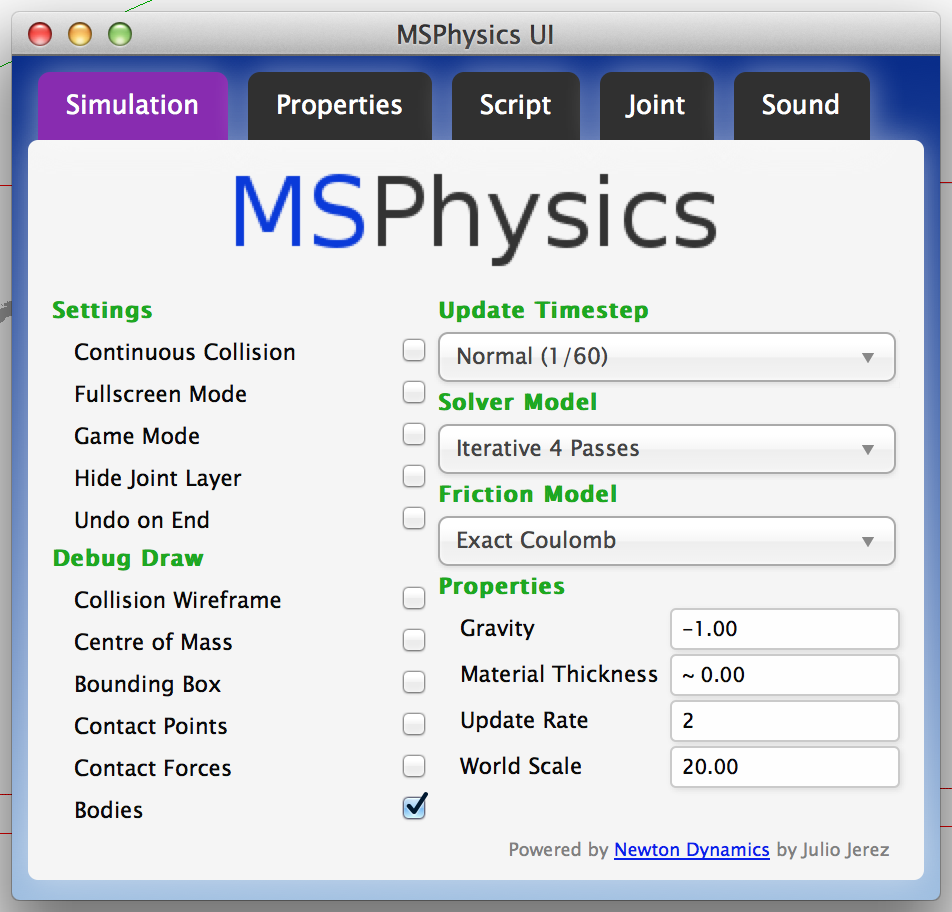
@surfmike In case you're dealing with tiny objects in your model, you need to adjust some world parameters. For your model, changing gravity to -1.0 and setting world scale to 20 prevents the penetration. Furthermore, In order to get the servo to interact with objects A and B, more precisely have the servo rotate object B with respect to object A, you should group the servo joint with object A and then, use the Joint Connection Tool to connect the servo with object B. The connection can be done by activating the Joint Connection Tool, selecting the servo joint, holding down the control or shift button, and then selecting a desired group (object B in your case).
@chrisjmitchel, I don't know what may be causing the error. What you can do is open Ruby Console, press Toggle Play, and then try clicking on the objects. If there's an error it might be outputted in the console.
-
@bambutec said:
Hey Guys,
just dowloaded MSPhysics. Using a model like ray_test_0.9.skp , for me any change of properties like friction coefficients resp. change of materials do not reflect in how body´s behave. What could be the reason ?
My platform is a mac on OS X 10.11.4 with SketchUp Pro 2016 16.0.19913.
My intend is to simulate slide configurations and other attractions in Play and Leisure applications. Close to reality behavior is essential.
Would be so great if this works, it is very promising !!
Regards
Uli
My apologies for not responding, bambutec. I didn't see your post. I can indeed reproduce the friction bug on my Windows platform. I will notify you once it's fixed. Thanks for the report!
-
@realkim0123 said:
There is the only install program for Window environments.
How can I install MSPhysics in Mac OS X?Yes, at the moment there is no installer for Mac OS X. To install it on Mac OS X, download MSPhysics_0.x.y.rbz, open SketchUp, navigate and select (Menu) Windows -> Preferences. Then click on Extensions tab, "install Extension..." button, select MSPhysics_0.x.y.rbz and click open. Following these steps should install you MSPhysics on Mac OS X.
-
@malaise said:
Hallo Guys
Good to know ( on SketchUp2015 or 2016 /windows 32 bit), It seems that only the 60 first
pictures are exported. Perhaps, it's matter of Windows Version.Pierre
Hello Pierre,
I tried recording your model and then exporting animation into PNG images, and I was able to export more than 60 of them. So, you do know the proper steps for recording and exporting animation, right? In order to export you need to record simulation, for a suitable time. If you recorded for 60 frames, then only a maximum of 60 frames would be exported (unless your speed was less that one). So, maybe you need to record it for a bit more time prior to exporting it. Another reason to that may be the export settings. The actual quantity of images exported in an animation is ("End Frame" - "Start Frame") / "Speed". Maybe altering one of these parameters in the export settings might fix the issue on your end.
Hope that helps,
Anton -
@anton_s said:
@surfmike In case you're dealing with tiny objects in your model, you need to adjust some world parameters. For your model, changing gravity to -1.0 and setting world scale to 20 prevents the penetration.
Group the joint with object A worked out way better. Thanks.
However the other "sink into ground" issue still remains.
Do I have the right settings?Also the test file "curvy_joints.skp" have the same issue...
-
How about you try setting material thickness to 1.0. Maybe that will prevent the issue. In Newton, there is always fraction al penetration however you can adjust world properties to minimize it.
-
Nope, material thickness 1.0 made it even worse. The objects also started shattering...
-
Thanks Anton, that did produce an error, though I don't understand it.
Here is what it gave me:Error; #<NoMethodError; undefined method `solver_model=' for #<MSPhysics;;World;0x0000001036bf18 @address=287093504>> C;/Users/Chris/Dropbox/Sketchup Stuff/Plugins/MSPhysics/simulation.rb;2632;in `activate' C;/Users/Chris/Dropbox/Sketchup Stuff/Plugins/MSPhysics/simulation.rb;27;in `select_tool' C;/Users/Chris/Dropbox/Sketchup Stuff/Plugins/MSPhysics/simulation.rb;27;in `start' C;/Users/Chris/Dropbox/Sketchup Stuff/Plugins/MSPhysics/main.rb;575;in `block in <top (required)>' SketchUp;1;in `call' Error; #<NoMethodError; undefined method `valid?' for #<MSPhysics;;World;0x0000001036bf18 @address=287093504>> C;/Users/Chris/Dropbox/Sketchup Stuff/Plugins/MSPhysics/simulation.rb;3181;in `getExtents' Error; #<NoMethodError; undefined method `valid?' for #<MSPhysics;;World;0x0000001036bf18 @address=287093504>> C;/Users/Chris/Dropbox/Sketchup Stuff/Plugins/MSPhysics/simulation.rb;2761;in `deactivate' C;/Users/Chris/Dropbox/Sketchup Stuff/Plugins/MSPhysics/simulation.rb;35;in `select_tool' C;/Users/Chris/Dropbox/Sketchup Stuff/Plugins/MSPhysics/simulation.rb;35;in `reset' C;/Users/Chris/Dropbox/Sketchup Stuff/Plugins/MSPhysics/simulation.rb;2164;in `abort' C;/Users/Chris/Dropbox/Sketchup Stuff/Plugins/MSPhysics/simulation.rb;2148;in `rescue in call_event' C;/Users/Chris/Dropbox/Sketchup Stuff/Plugins/MSPhysics/simulation.rb;2141;in `call_event' C;/Users/Chris/Dropbox/Sketchup Stuff/Plugins/MSPhysics/simulation.rb;2948;in `onMouseMove'Thanks for looking at this!
Never mind.... It was idiot error! I had installed it through Sketucation AND through the Ext Warehouse and that was causing the problem.
Thanks again!
-
@surfmike said:
Nope, material thickness 1.0 made it even worse. The objects also started shattering...
Sutfmike does that happen to the sample model you posted here?
-
Anton_S, yes it does, also the same happens in the "curvy_joints.skp" file as well.
We're talking of a minor sag, but still... -
Surfmike, one last thing I can recommend is changed solver model to 64 passes.
-
A new version 0.9.4 in the first post but I can not find any information about what has been changed...?
-
I recently saw a IKEA presentation where they used a custom plugin in Max for placing things more naturally. It had no setup if I'm not mistaken.
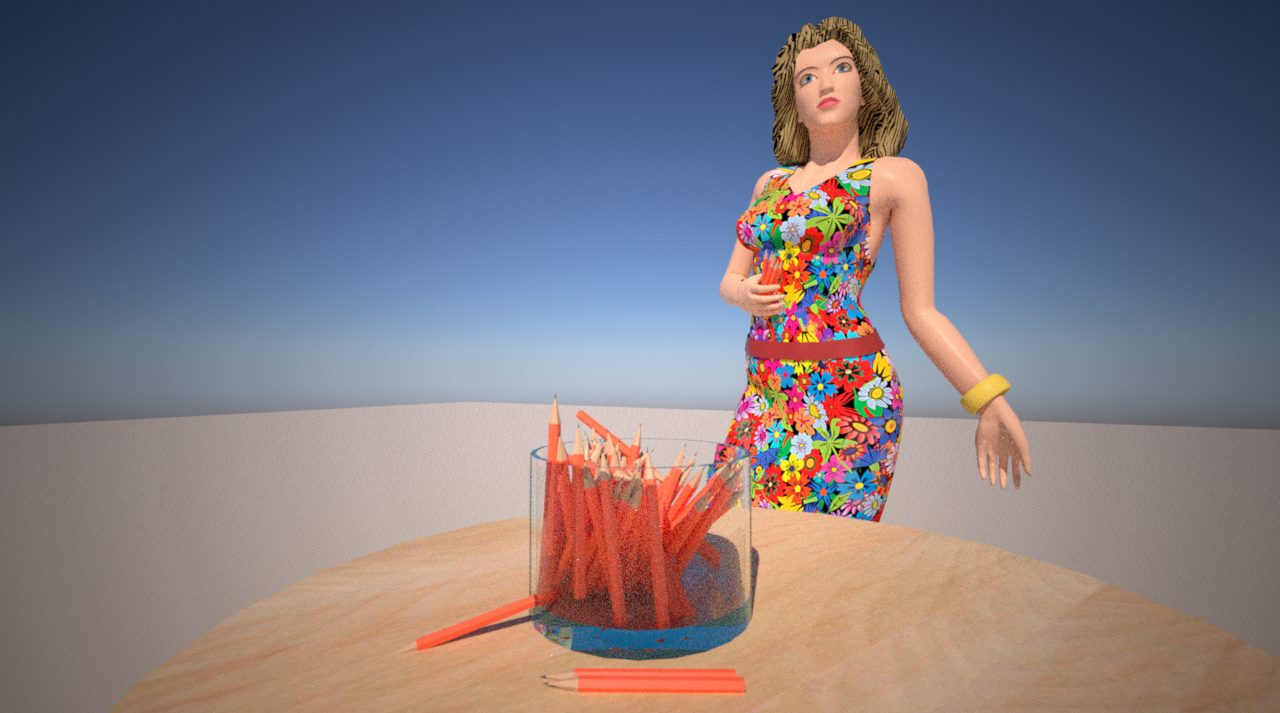
Would it be possible for a quick use mode where you with minimal input could simulate things like pens in a mug or stacked items like plates, books and such?
The key word is "minimal input" for quick, one time simulations like the above examples. -
Faust, I fixed the friction bug and improved start performamce witb joints in this, 0.9.4, version . However, I did break some things in the dialog. So I guess you're going to have to wait till next week for the fix.
Pixero, that's interesting. At the moment there is no simple way of simulating for siref groups till they stop, however, I added this to the list.
-
Here is some more info on IKEA's "earthquake" plugin:
http://vimeo.com/163789781It starts approx 23 minutes in but the whole video is very interesting to watch.
Martin says in the comments:
"The physics simulation is using a physics engine and is a plugin. Only one button setup. All hidden geometry is not used. All non selected will be unyeilding and all selected gets hardbody physics properties."Something like this would be very useful in SketchUp.
-
Not new - but SketchUp + MSPhysics. The rendered version looks much better...

Time: Modelling and MSPhysics 0,5 h; Layout and GIF-Output for this post 1,5 h (max. 2 MB)...
Edit: + a quick indigo render frame...
-
hello
how to change the color of a solid?I tried :
onStart{
@box = simulation.find_body_by_name("box")
or
@box = simulation.find_group_by_name("box")
}onUpdate{
if key("up") == 1
@box.material.color = [0, 255, 0]
Else
@box.material.color = [255, 255, 255]
end
}Envoyé de mon PRO 5 en utilisant Tapatalk
help me if please.
-
@synsuka3d said:
hello
how to change the color of a solid?I tried :
onStart{
@box = simulation.find_body_by_name("box")
or
@box = simulation.find_group_by_name("box")
}onUpdate{
if key("up") == 1
@box.material.color = [0, 255, 0]
Else
@box.material.color = [255, 255, 255]
end
}Envoyé de mon PRO 5 en utilisant Tapatalk
help me if please.
Hi, select the Paint Bucket and add material to group and try again.
-
Pixero, I'm working on that feature.
Faust, that's a stunning piece of animation!
SynSuka3d, like Istvan implied, you can add material to group prior to changing its color. You can also do it with script, in case the group doesn't have a material associated with it. However, if the inner faces are already colored by a different material, you must decolor them to default material, both front and back faces, so that the group's top level material is able to color them.
Note that the object that contains the script should be part of simulation, that is not ignored; otherwise, the script of that object won't execute.
Now, to answer your question, if the script is associated within the body you're coloring, you can have
@box = this.group. Otherwise, it should be@box = simulation.find_group_by_name("box"). Note that the name is case sensitive and considers all the blank spaces. Anyway, here is the script containing it all:onStart{ @box = simulation.find_group_by_name("box") # Add material to the box in case the box has no material. if @box.material.nil? mat = Sketchup.active_model.materials.add("BoxMaterial") @box.material = mat mat.color = [255,255,255] # optional end # Record starting color, just so we can reset it in the end @starting_color = @box.material.color # Utilize 'flag' variable to avoid coloring group the same color multiple times. # Just for optimization purpoposes... @flag = nil } onUpdate{ if key("up") == 1 if @flag != 1 @box.material.color = [0, 255, 0] @flag = 1 end elsif @flag == 1 @box.material.color = [255, 255, 255] @flag = 0 end } onEnd { # Reset color (also optional). @box.material.color = @starting_color }
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement