MSPhysics 1.0.3 (16 October 2017)
-
Hi, Bert
Here it is:
delchrys - gatorator.skp
Now it rotates along the pipe, like desired.I also made it compatible with MSPhysics 0.9.9. I assigned all bodies a mass of 1.0 so that the joints are robust. This won't be necessary in the final MSPhysics, version 1.0.0, but that's what required in the current version. I also added grippers to the clutches. The clutches themselves are ignored, but the grippers are collidable. If you enable the MSPhysics Joints layer, you will see the grippers. I also changed the solver model to iterative 64 passes, once again, for a more stable behavior of joints in the current versions of MSPhysics.
Regards,
Anton -
Hi Anton,
thanks you are the greatest. Now i'm going to figure out all the joints and combinations of groups so i can figure how you do it.
Also i'm adding a other wrench that is holdng the other end of the pipe.
Then i hope it will loosen like i need it to.
Keep you update!!! -
Anton?
How do you make the guide points? -
So, for a circle/arcs, you right click on them and select "Find Center".
-
Ah thanks you didn't know that option. Also downloaded pointtool plugin. Tonight in my nightshift I'm going to draw some more of the model to make a nice overview to show at work. Really loving this msphysics plugin. Possibilities are almost endless
-
Does someone have any advise in rendering for sketchup?
Preferably free??
Like to render some things when i'm done, needs to look good
-
@anton_s said:
So, for a circle/arcs, you right click on them and select "Find Center".
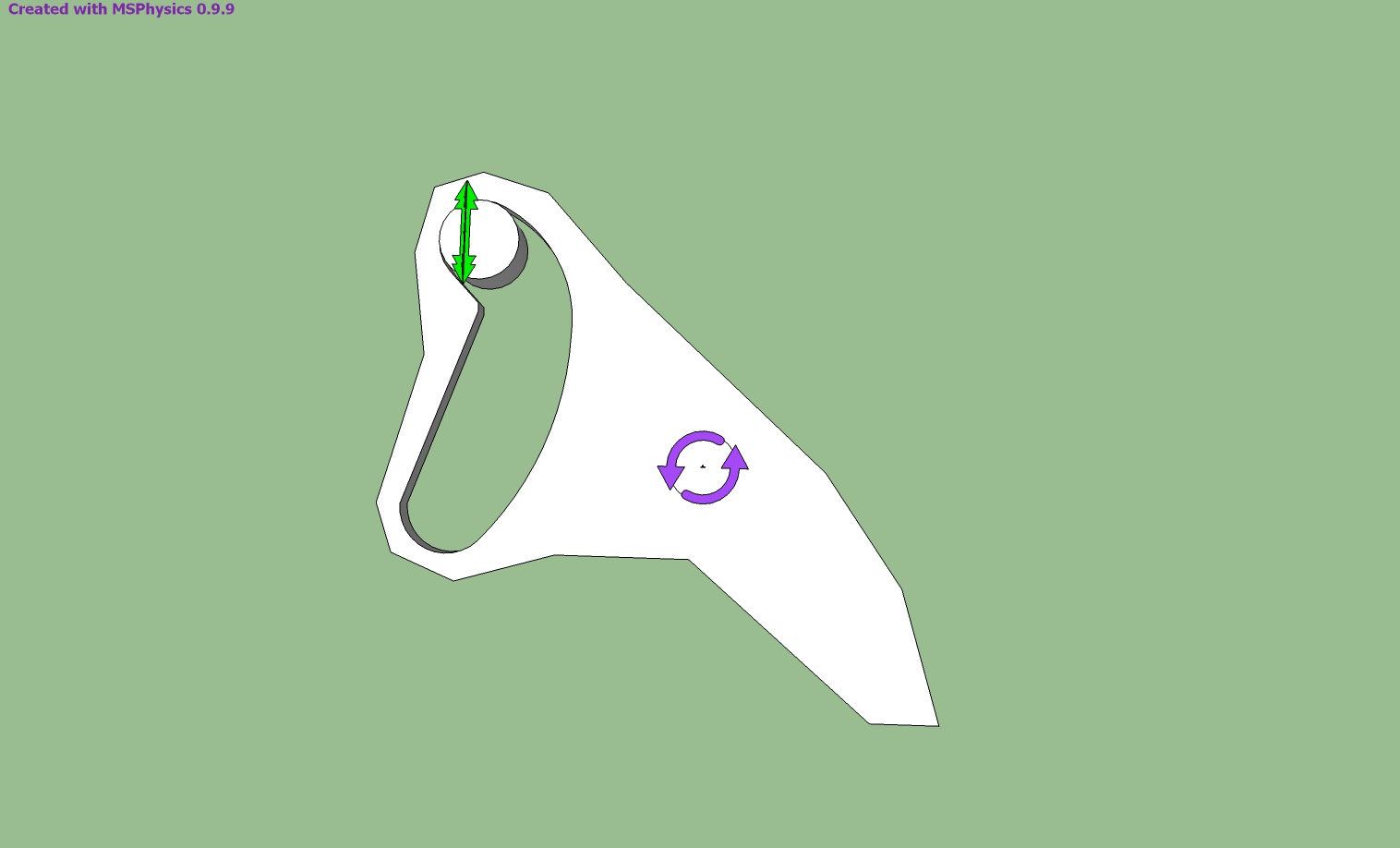
So i kind of remodelled a bit, but can't seem to understand why the pipe continues to rotate even when the grippers are open. It kind of get momentum because of the rotation, how can i stop that. So when the cylinder moves back, the grippers open and let go of the pipe and it stands still.
Made the body static because it will be connected with the other wrench, so that only the gripper head rotates.
Did i do the pipe right by giving him a plane joint and only allow it to rotate???
I don't want it to move in any other direction then rotating caused by the grippers.
Should i accomplish this all by adding friction or is there a simple workaround?
I doesn't have to be Physics Law proof but only look right.A lot of questions but getting there

PS is ther a plugin for SU2016 to import 2017 files or a simple converter??? I cannot install 2017 at work due to lack of administrative rights

-
Hello, Bert,
@delchrys said:
So i kind of remodelled a bit, but can't seem to understand why the pipe continues to rotate even when the grippers are open. It kind of get momentum because of the rotation, how can i stop that. So when the cylinder moves back, the grippers open and let go of the pipe and it stands still.
To fix this, you need reduce linear friction of the Plane joint from 100 to 1. This will the pipe to require less force to move along the plane. Also, setting the angular friction of the Plane joint to 0.01 should prevent the backward rotation of the pipe.
@delchrys said:
Did i do the pipe right by giving him a plane joint and only allow it to rotate???
Either the tool should move or the pipe should move for the grippers to work properly, presumably even in real case scenario. Above, reducing plane linear friction, allows the pipe to move.@delchrys said:
PS is ther a plugin for SU2016 to import 2017 files or a simple converter??? I cannot install 2017 at work due to lack of administrative rights
Click onFile->Save As and in the Save As Type, choose the desired SU version.
Regards,
Anton -
-
The first impression is good, but for me it is still too difficult to understand some of the physical characteristics of the movement.
Thanks
-
Nice! If you change joint solver model to iterative 64 passes, the wobbling should be reduced by a bit.
-
Found this!

-
I modeled it as shown in the picture, but I could not move it as I wanted. Can you help me.
-
Ecati, the reason it doesn't work as expected is that the collision generated for the concave group is improper. You must divide the concave group into sub convex groups. Use convexify by fredo6 to do it for you. The link to the plugin is at the main post. Also, to see the actual collision generated for shapes, enable the Collision Wireframe in MSPhysics Simulation UI.
-
Testing traditional thing!
Arch was made with the crazzy Convexify by Fredo!
As convexify don't keep gaps you must use Exploded view ;by CPlassais and me!

Carving by Joint Push Pull by Fredo
-
Thank you for your reply. The cylindrical piece moves up when I press play, what could be the reason?
-
-
Hi, Ecati,
@ecati said:
Thank you for your reply. The cylindrical piece moves up when I press play, what could be the reason?
I answered that in my prior post.
Generally there are two ways to do it.
- Divide the concave thingy into convex sub-groups. Using Convexify plugin by Fredo6 should do it for you. You must ensure that the group you divide is initially a solid group. You can use CleanUp along with Solid Inspector by ThomThom to help you fix it. Then once the group is divided, the collision should generate properly. I did it for you, so you can see what I mean: ruffler çizim - way1.skp
- A more advanced approach is to have the model rely on joints and have the collision be ignored. I'm not going to explain it in depth, but basically you utilize the curvy joint to have the cylinder move along the curve. If you enable the joints layer, you will see it. Here is the model: ruffler çizim - way2.skp
Regards,
Anton -
Hi, Anton,
I am thankful to you. Thank you so much. -
Hey, y'all,
I just made a tutorial on making collision based and joint based copy-able chains. It's in Russian, but a picture is worth a thousand words...
Here is the chain model basing on collision:
https://drive.google.com/open?id=0B3qg8f4WrNdHTWFYOWtkZ3g0RUkHere is the chain model basing on joint connections:
https://drive.google.com/open?id=0B3qg8f4WrNdHU2NxYnNWTXgxLWcSo, if you're interested in making chains, you should definitely check it out.
-- Anton
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement