MSPhysics tests and questions
-
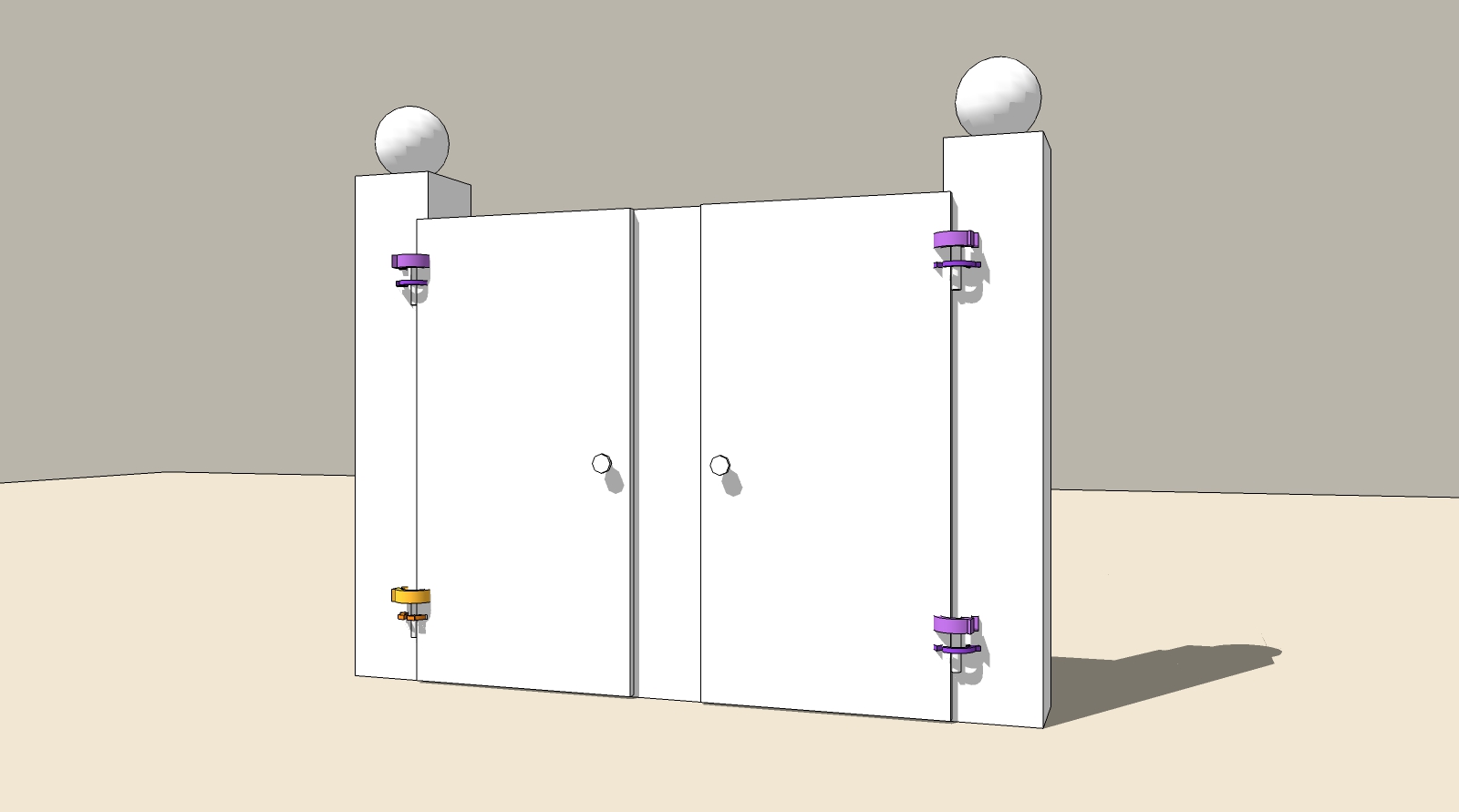
A door model to test the behavior of hinge and servo joints.
The model works in MS- and in SketchyPhysics. Thin and thick joints ...
The left door opens in MSPh automatically due to the adjustment of the servo. In SPh it can be opened and closed with a joint controller. The right door can be opened and slammed with the mouse ...
Is there a plan to implement joint controllers also in MSPhysics?
In a next experiment, I would like to test how the door wings can be opened and closed with an OnTouch function or a timer in a script for a servo joint.
-
Thanks for posting this, faust. I was just about to post a question/bug report about a hinge joint that was behaving erratically. The joints you made in here are working perfectly though. I will dissect this file to see if I can find out what I did wrong.
-
The left door now has the MSP Control Panel. However, it has a strange behaviour when it is slammed with it. Another question is why the Control Panel is unresponsive after some time?
Ah, to set the constraint Type of the Servo to "Robust" solves one problem.
Then, the door does not fly off the hinges. But the problems of the inactive panel and slide through the centre post remain.
-
Oh wow, wind and leaves, I would love that trick/option.
-
Need help to rewrite this SP script for a scene camera (Mr.K) in an MSP friendly version. This would facilitate the parallel control of camera and sliders.
If this is possible at all. Thanks in advance. For the GIF illustration I have the leaves of MrWip modified a little.onUpdate { if frame==0 @transition_time=90 @pages=Sketchup.active_model.pages @cam=Sketchup.active_model.active_view.camera @page_num=@pages.count-1 @cur_page=0 @next_page=1 end if frame>0 per=frame%@transition_time if per==0 @cur_page+=1 @next_page+=1 @cur_page=0 if(@cur_page>@page_num) @next_page=0 if(@next_page>@page_num) end per=per.to_f/@transition_time page_cam1=@pages[@cur_page].camera page_cam2=@pages[@next_page].camera p1=page_cam1.eye.to_a p2=page_cam2.eye.to_a eye=interp(p1,p2,per) p1=page_cam1.target.to_a p2=page_cam2.target.to_a tar=interp(p1,p2,per) p1=page_cam1.up.to_a p2=page_cam2.up.to_a up=interp(p1,p2,per) @cam.set(eye,tar,up) end if frame==0 def interp(p1,p2,per2) p3=[] per1=1-per2 (0..2).each{|index| p3[index]=p1[index]*per1+p2[index]*per2 } return p3 end end }
-
It's not a trick it's Physics...

Here two possible solutions to "wind machines" in MSP - pendulum and inclined plane ...
Other variants could be aligned emitters, "leave-guns" or magnetism (which I have used in the door type a little).

-
Tricky!
-
I need help with a short camera script to transform from SP to MSP and to learn the differences. Thanks in advance.


-
Idea for a game: "Orcano"
If anyone is interested, the model is attached.
Orca from the 3D Warehouse - reduced amount of data and optimized a little for MSP.
Inspiration and technique of control by AntonS models "wall&water" and "boat-car".
Control of Orca with arrow keys.
Kick the ball into the goal...


-
Orcano - a little bit improved. It is now easier to hit the target. The Orca can jump.
If anyone can program a Score counter - please, it would be nice.
Waves there are not - too bad ...
-
Progress with the path-controlled camera. Thanks to Anton_S and PituPhysics for the examples and the current MSPhysics models in the 3D Warehouse.
-
2 small GIFs from the first tests with Indigo RT. A fine thing would be if you could create abstracted objects of waves, water spray or foam where objects hit the water. This could be emitter objects that are released by a contact test with the Buoyancy Plane.
-
"Foam" test with the onTouch method. I have to keep working a little more...
Rendered with Indigo RT. Animals from 3D warehouse.


-
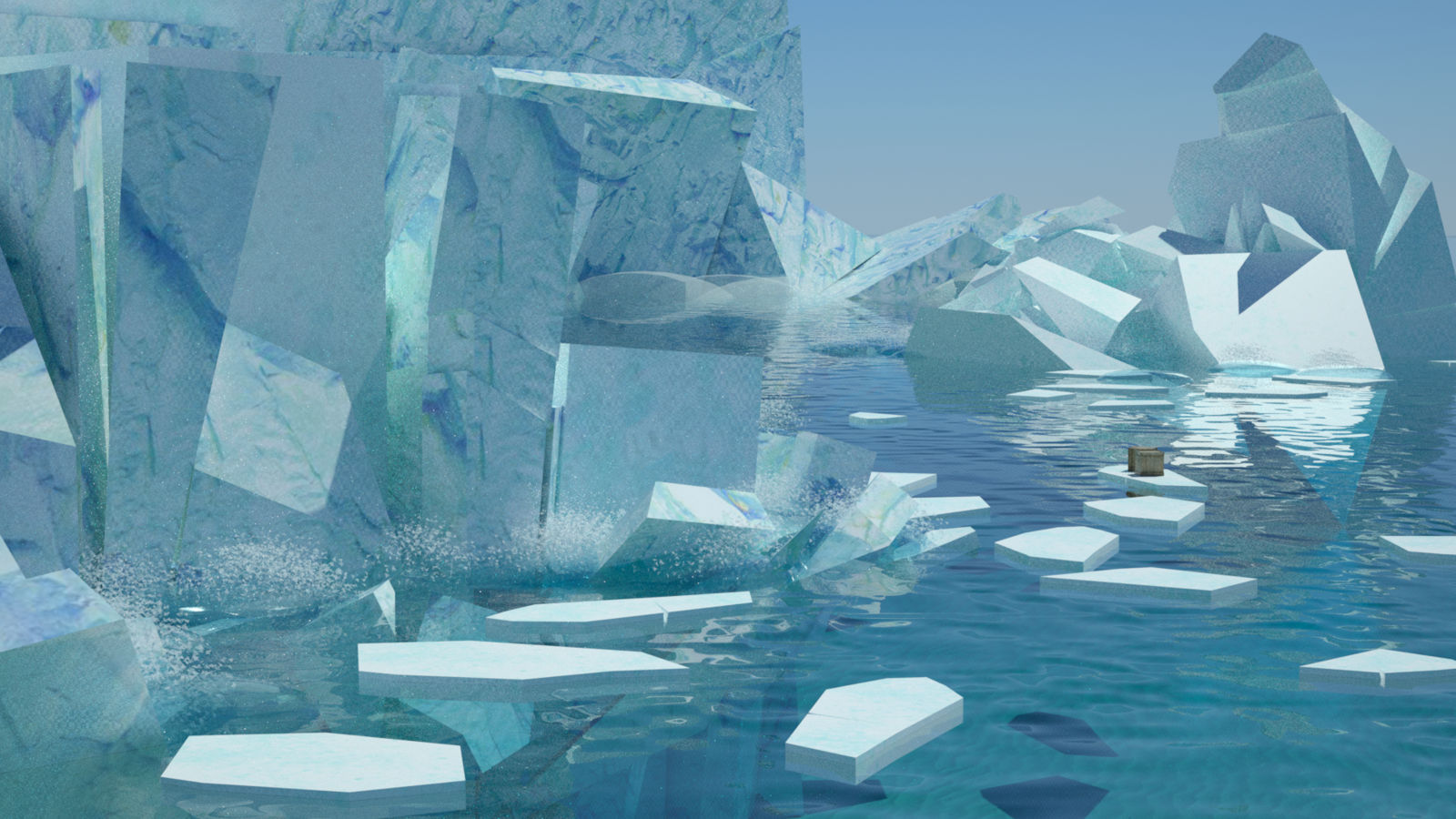
Test pictures of the evolving iceberg animation with fog and water splashes. Rendered with indigo RT for about 2 to 3 minutes per frame. Not to forget: TIG split tools.


-
Shark body contact - and a little bit of water splashes.
I slowly reach my desired results through MSPhysics and small improvements of my scripting capabilities...
It would be desirable to be able to start the simulation at a specific frame (MS Physics calculates the model until then in "the dark").
In addition it would be fine if we could save to Replay, export to the renderer and start rendering at the end of the simulation with default settings automatically (in the case of time consuming simulations).

")
-
These are amazing! Well done
-
Thanks Rich
-
We are listening seagulls!
-
Oh yes! Sound is the next step. No problem with MSPhysics...
-
That's a fine piece of rendering, faust!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement