How to get the absolute coordinates of faces?
-
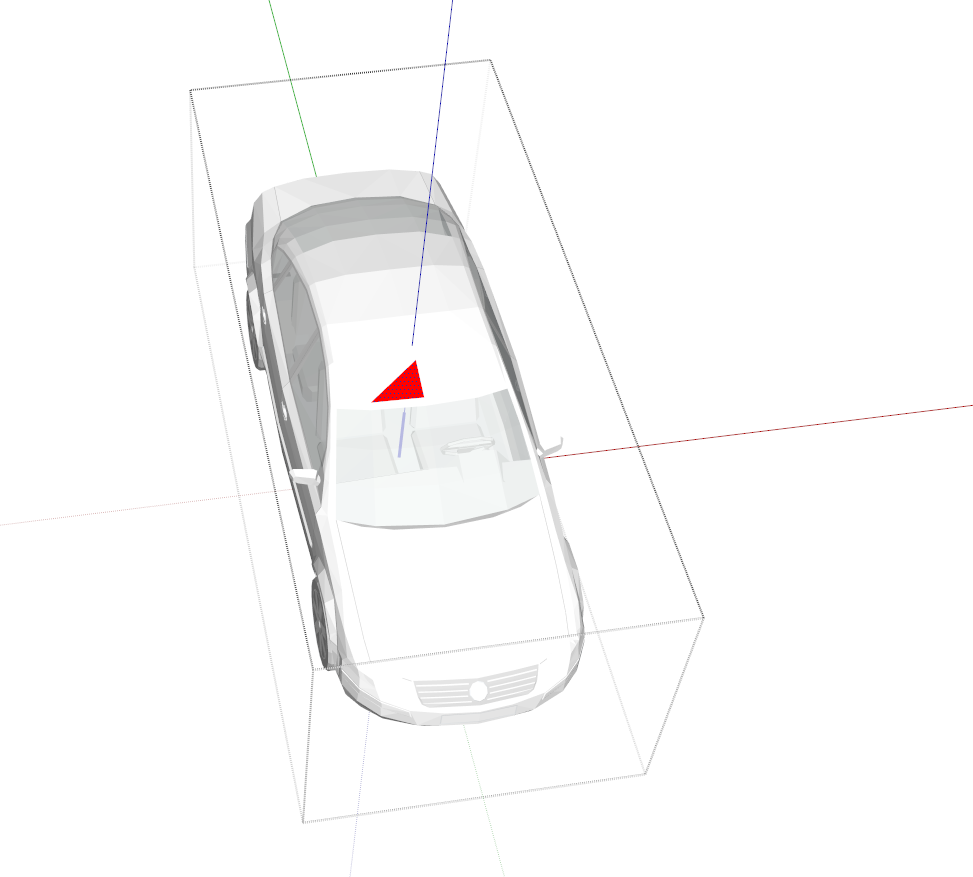
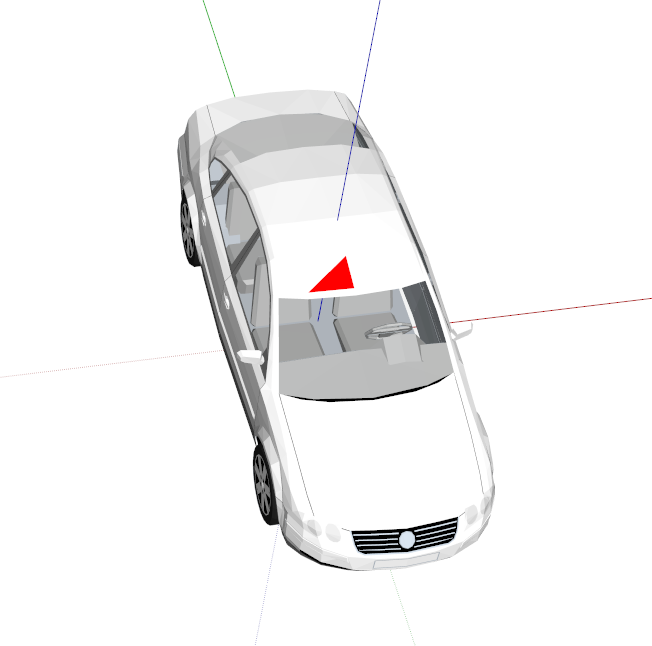
I want to get the absolute center coordinates of faces. But I find the coordinates are affected by the edit mode. Two images in the attachment is an illustration. The first image shows model in edit mode, while the second does not. My goal is to get the absolute coordinate of the center of the red face. However, in the first image, the center is Point3d(-9.0624, -22.0221, 63.6455); in the second image, the center is Point3d(-0.178652, -0.258835, 1.39058).
The first coordnate is what I wanted. But this required me to use mouse to clik the model several times. Could anyeone tell me if there are some methods to get the absolute coordinate without mouse clik?
-
I assume you have somehow got the center of the face inside its 'context' - let's call it
pt.
You have a reference to the face's 'container' [a group or instance].
You can get the transformation of that - e.g.tr=instance.transformation.
You can apply a transformation to a point thus:
pt.transform!(tr)You can also do the inverse - e.g. you have a point outside of the context and want to convert it as if it's inside the context...
pt.transform!(tr.inverse)I'm unsure about which way round you want to do this, but somewhere in this is your answer...
-
Here's what I've got.
def self.currentPos(parent, child_pos) #Get the position of the point relative to parent's transformation return child_pos unless (parent.class == Sketchup;;Group) and (parent.class == Sketchup;;ComponentInstance) tra = parent.transformation.origin.to_a xaxis = parent.transformation.xaxis.to_a yaxis = parent.transformation.yaxis.to_a zaxis = parent.transformation.zaxis.to_a # my experimented formule external_pos[x] = tra[0] + child_pos[0]*xaxis[0] + child_pos[1]*yaxis[0] + child_pos[2]*zaxis[0] external_pos[y] = tra[1] + child_pos[0]*xaxis[1] + child_pos[1]*yaxis[1] + child_pos[2]*zaxis[1] external_pos[z] = tra[2] + child_pos[0]*xaxis[2] + child_pos[1]*yaxis[2] + child_pos[2]*zaxis[2] #external_pos = child_pos.transform(parent.transformation).to_a #alternative sketchup formula return external_pos endCopy to editor to unwrap the code lines.
It basically shows how thattransformformula works
By the way If you have sketchy physics, you can see play with something similiar here: Navigation System -
@tig said:
I assume you have somehow got the center of the face inside its 'context' - let's call it
pt.
You have a reference to the face's 'container' [a group or instance].
You can get the transformation of that - e.g.tr=instance.transformation.
You can apply a transformation to a point thus:
pt.transform!(tr)You can also do the inverse - e.g. you have a point outside of the context and want to convert it as if it's inside the context...
pt.transform!(tr.inverse)I'm unsure about which way round you want to do this, but somewhere in this is your answer...
I split my 3D car model in several parts, e.g. door, wheel, etc. I want to locate their center no matter the user change the view point.
Use the top of the car as an example, I built a "car_top" group, and used the group as a container, but still did not get the correct coordinate.
-
@anton_s said:
Here's what I've got.
def self.currentPos(parent, child_pos) #Get the position of the point relative to parent's transformation > return child_pos unless (parent.class == Sketchup;;Group) and (parent.class == Sketchup;;ComponentInstance) > tra = parent.transformation.origin.to_a > xaxis = parent.transformation.xaxis.to_a > yaxis = parent.transformation.yaxis.to_a > zaxis = parent.transformation.zaxis.to_a > # my experimented formule > external_pos[x] = tra[0] + child_pos[0]*xaxis[0] + child_pos[1]*yaxis[0] + child_pos[2]*zaxis[0] > external_pos[y] = tra[1] + child_pos[0]*xaxis[1] + child_pos[1]*yaxis[1] + child_pos[2]*zaxis[1] > external_pos[z] = tra[2] + child_pos[0]*xaxis[2] + child_pos[1]*yaxis[2] + child_pos[2]*zaxis[2] > #external_pos = child_pos.transform(parent.transformation).to_a #alternative sketchup formula > return external_pos > endCopy to editor to unwrap the code lines.
It basically shows how thattransformformula works
By the way If you have sketchy physics, you can see play with something similiar here: Navigation SystemThanks for your code. But I still did not get the coordinate that I want, the return coordinate is equal to the child's coordinate. The type of the child is Sketchup::Face, and the type of its parent is Sketchup::ComponentDefinition. I made a group like this:
model = Sketchup.active_model; groups = []; model.definitions.each{|d| groups << d if d.group? } entities = model.entities; selection = model.selection; pgrp = []; groups.each{|d| pgrp << d.instances[0] if d.instances[0].name=="car_top" } tmpents = pgrp[0].entities; #print pgrp[0] faces = tmpents.find_all{|entity|entity.class==Sketchup;;Face} ctr = faces[8].bounds.center print ctr pos = self.currentPos(pgrp[0], ctr) print pospgrp[0] is a group that contain faces[8]. May be there are some bugs...
-
Sorry, rewritten it with errors.
 Here's a better version:
Here's a better version:def currentPos(parent, child_pos) #Get the position of the point relative to parent's transformation return false if (parent.class != Sketchup;;Group) and (parent.class != Sketchup;;ComponentInstance) tra = parent.transformation.origin.to_a xaxis = parent.transformation.xaxis.to_a yaxis = parent.transformation.yaxis.to_a zaxis = parent.transformation.zaxis.to_a external_pos = Array.new(3) # my experimented formule external_pos[0] = tra[0] + child_pos[0]*xaxis[0] + child_pos[1]*yaxis[0] + child_pos[2]*zaxis[0] external_pos[1] = tra[1] + child_pos[0]*xaxis[1] + child_pos[1]*yaxis[1] + child_pos[2]*zaxis[1] external_pos[2] = tra[2] + child_pos[0]*xaxis[2] + child_pos[1]*yaxis[2] + child_pos[2]*zaxis[2] #external_pos = child_pos.transform(parent.transformation).to_a # alternative sketchup formula return external_pos endCopy to nowpad++ to unwrap all lines
Note its no moreself.currentPos, its justcurrentPos -
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement