Nouveau jouet, nouveaux problèmes...
-
Salut à tous,
ça fait un moment que je n'ai pas posté parce que je m'investis depuis quelques temps dans les outils de fabrication numériques, pour comprendre les flux de FAO et voir comment les appliquer à l'architecture.
Après la découpe papier avec une CraftRobo Pro, après la découpe polytyrène 2D avec une MiniCut 2D (découvert il y a 3 ans à la MakerFaire au 104), après les imprimantes 3D de tous poils (RepRap, MakerBot et Dagoma), après une fraiseuse CNC maison (qu'il faudrait que je termine...), je m'attaque au bras robotisé 5 axes !
Je viens de recevoir un petit jouet d'entrée de gamme piloté par Arduino : le Braccio (acheté chez SemaGeek, un "voisin" du sud).
 Petite vidéo du premier test
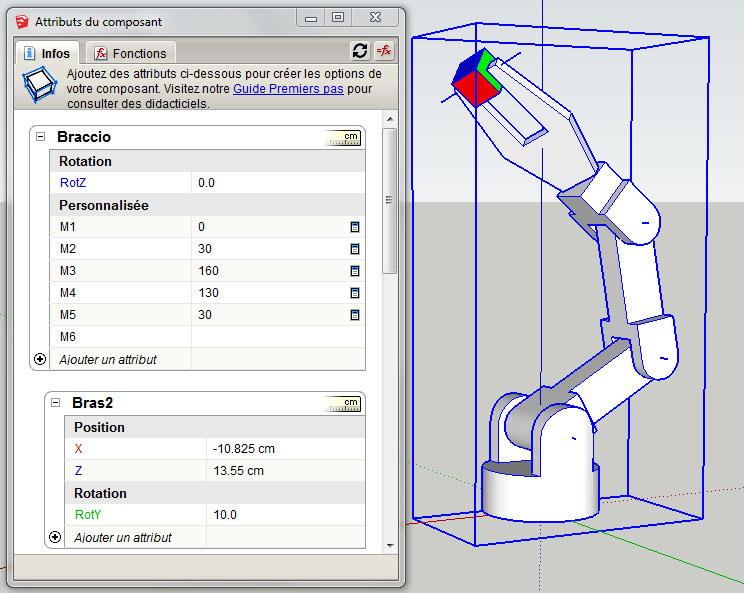
Petite vidéo du premier testMe voilà donc dans un monde nouveau, où la bonne vieille logique des coordonnées cartésiennes orthonormées XYZ sont mises à mal par des jeux d'angles de rotation des différentes articulations. Donc, pour que j'arrive à mieux comprendre, j'ai fait un petit modèle en composants dynamiques où on rentre les angles et le système calcule la position de l'objet.
Ça marche bien... Mais maintenant, il faut que je fasse la démarche inverse, donner un point "cible" avec des orientations de l'objet et déduire les différents angles de chaque articulation ! Mes premiers calculs donnent des trucs d'un autre monde, qui en plus ne fonctionne pas vraiment
Est-ce que vous avez des pistes de documentations qui permettrait de comprendre facilement comment passer de coordonnées XYZ (et éventuellement des rotations sur ces axes) à la suite d'angles à appliquer à un bras pour arriver à ce point ?
-
çà?
 (aucune idée si c'est à considérer comme facile ou pas!
(aucune idée si c'est à considérer comme facile ou pas! 
http://www.mon-club-elec.fr/pmwiki_mon_club_elec/pmwiki.php?n=MAIN.ArduinoMecatroniqueBrasLong5ServosPrehensionBalleTrackingBallxy -
Sinon il semble qu'il y ait tout là-dedans!
http://fr.slideshare.net/souissi2013/cours-robotique-complet -
Merci Pilou !
Je l'ai trouvé hier soir aussi, mais vu la fatigue j'ai pas creusé.
Dans l'article il y a un PDF avec ce que je cherche je pense. Ca commence simple, et au bout d'un moment j'ai décroché...Je vais le reprendre tranquillement à tête reposée

-
Re-merci Pilou
Visiblement c'est une approche généraliste qui a l'air de donner une bonne idée des choses.
... et surtout, ça me montre bien qu'il faut absolument que je me remette à bosser les matrices, parce que ça fait 20 ans que je n'en ai pas fait, que je trouve toujours le moyen de contourner par d'autres approches. Mais là, sans ça, je crois que ça va être compliqué... -
Salut DareDevil, joli le bras articulé, bien impressionnant et bonne idée pour faire de la maquette.Regarde la' Pour les rotations.
http://jeux.developpez.com/faq/math/?page=transformations#Q40
Après tu pourrais essayer de programmer en processing un petit logiciel, mais c'est du temps...
https://processing.org/
Ou en scratch éventuellement:
https://scratch.mit.edu/
Merci de nous tenir au courant à propos du bras...
Cordialement. -
-
-
Il est en phase de test, écris à Rich O Brien ou Fredo.
Je ne sais si la liste des testeurs est fermée ou pas!Et Processing a fait un petit P5.js qui a l'incroyable avantage de marcher directement dans le navigateur! (voir mes déboires
-
[quote="pilou"]Il est en phase de test, écris à Rich O Brien ou Fredo.
Je ne sais si la liste des testeurs est fermée ou pas!Merci. Je tente
-
@creaform said:
Salut DareDevil, joli le bras articulé, bien impressionnant et bonne idée pour faire de la maquette.Regarde la' Pour les rotations.
http://jeux.developpez.com/faq/math/?page=transformations#Q40
Après tu pourrais essayer de programmer en processing un petit logiciel, mais c'est du temps...
https://processing.org/
Ou en scratch éventuellement:
https://scratch.mit.edu/
Merci de nous tenir au courant à propos du bras...
Cordialement.Merci pour le lien sur les matrices de rotation. Je vais m'y coller cet été et me replonger dans tout ça. Ça doit bien faire 20 ans que je n'ai pas toucher aux matrices

Coté Processing, ça fait déjà un moment que je l'ai dans la ligne de mire. J'ai déjà fait des petits trucs amusants, des petits test graphique, que j'ai lié avec un contrôleur midi par exemple. Comme je bidouille aussi sur Arduino (le bras est d'ailleurs un pur produit Arduino) le lien avec Processing est plutôt bien indiqué.
À suivre...
-
@PILOU
Cette extraordinaire animation ( Animation with multiple component instances ) , elle vient d'ou ?
Ou plutôt , qui l'a faite ?
Fredo6 ?
PILOU?BRAVO

Chri
-
C'est Fredo avec avec ses versions d'essais!
-
@chri said:
@PILOU
Cette extraordinaire animation ( Animation with multiple component instances ) , elle vient d'ou ?
Ou plutôt , qui l'a faite ?
Fredo6 ?
PILOU?BRAVO
Chri
C'est Sketchup le responsable. Ca a toujours marché et n'a rien a devoir a Animator.
Fredo
-
Les composants ou l'animation?
-
-
Elle se trouve tout simplement dans le fil principal de la publication d'Animator!
Post p597814
Avec les explications d'ailleurs!
-
Salut daredevil,
Ce que tu cherche a faire a un nom précis que j'ai entendu conférence. Je crois que c'est la kinetimatic inverse ou quelque chose comme ca. C'est hyper chaud parce qu'il existe des milliers de possibilités et l'ordinateur doit rechercher des optimums, et ca lui prend de la ressource.
La conférence ou il parlait de ton besoin , c'était une conference de Mohamed Laazizi sur ROS. Ror implemente directement des bibliothèques de kinetic inverse et semble le truc le mieux fait pour répondre à ton besoin. Ci-joint la chaine de Mo https://www.youtube.com/channel/UCzttgnt6MeGFG91oMeRn9Xw. Ce sujet est hyper vaste et possiotnant. un connecteur Ror sketchup serait une très bonne idée. Attention daredevil Ros est un piège dont peu sont revenu, ..... -
@adebeo said:
Salut daredevil,
Ce que tu cherche a faire a un nom précis que j'ai entendu conférence. Je crois que c'est la kinetimatic inverse ou quelque chose comme ca. C'est hyper chaud parce qu'il existe des milliers de possibilités et l'ordinateur doit rechercher des optimums, et ca lui prend de la ressource.
La conférence ou il parlait de ton besoin , c'était une conference de Mohamed Laazizi sur ROS. Ror implemente directement des bibliothèques de kinetic inverse et semble le truc le mieux fait pour répondre à ton besoin. Ci-joint la chaine de Mo https://www.youtube.com/channel/UCzttgnt6MeGFG91oMeRn9Xw. Ce sujet est hyper vaste et possiotnant. un connecteur Ror sketchup serait une très bonne idée. j'ai aussi trouvé la piste de la cinématique inverse dans mes recherches sur le sujet. Merci pour le lien vers les travaux de M. Laazizi, je vais prendre le temps d'explorer tout ça, les vacances arrivent @unknownuser said:
Attention daredevil Ros est un piège dont peu sont revenu, .....
je ne suis pas à ça près... Je tombe dans de gros pièges sans fonds régulièrement... non pas que j'en ressorte indemne, mais j'arrive à ne pas tomber tout au fond (pour l'instant...)
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement