Transformation.rotation help
-
Hi,
I can't get this to work quite right so I was hoping for some insight. The Transformation.rotation is a bit light on documentation in the API.@unknownuser said:
Transformation.rotationSketchUp 6.0+
The rotation method is used to create a Transformation that does rotation about an axis.The axis is defined by a point and a vector. The angle is given in radians.
Arguments:
point
A Point3d object.
vector
A Vector3d object.
angle
A numeric value, expressed in radians, that specifies the angle to rotate about the axis set by the second parameter.
Returns:transformation
a new Transformation objectFrom what I understand the point will be in 3D, but the Vector has to only contain 1 Dimension (i.e. the axis you'll be rotating around such as [0,0,1] or [1,0,0]).
What I want to do is rotate to a vector in 3D, which is essentially 2 successive rotations around axes such as y then x. The problem is that the two rotations that equal my 3d vector's direction don't lead to a correct rotation, but if I do only one of the rotations each seems correct for its respective axis.
I have a feeling I may need to just enter my own transformation matrix, but I was hoping I could just do it with existing commands...thoughts?
To make it a bit clearer here is an image. I want to rotate and translate an object from a point (origin in this case) to the end of a vector. This requires a rotation in two planes and a translation...
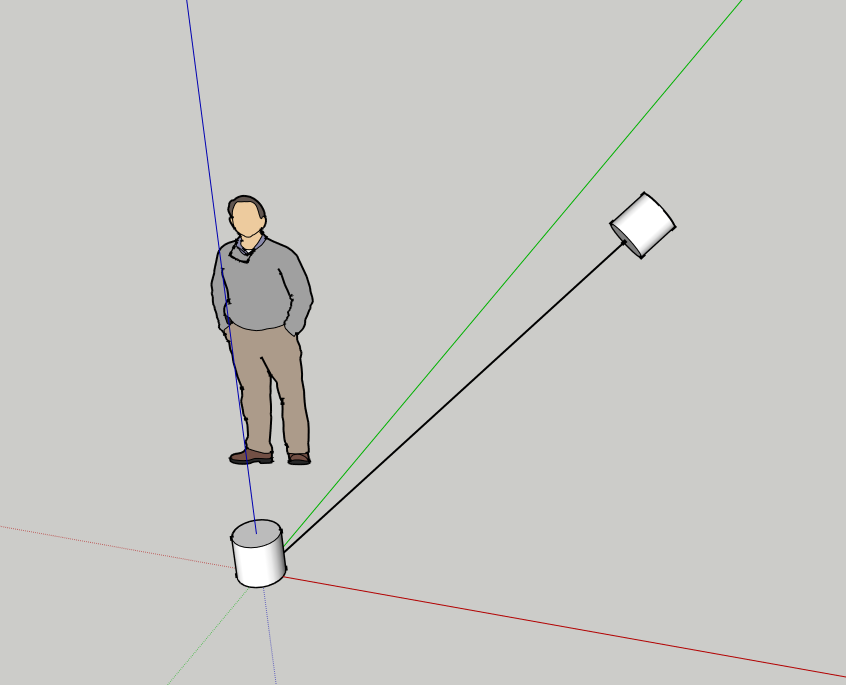
You can do the rotations with one operation in SU so I'm presuming I'm just missing something...
Sketchy..
-
You can see how it is wrong....
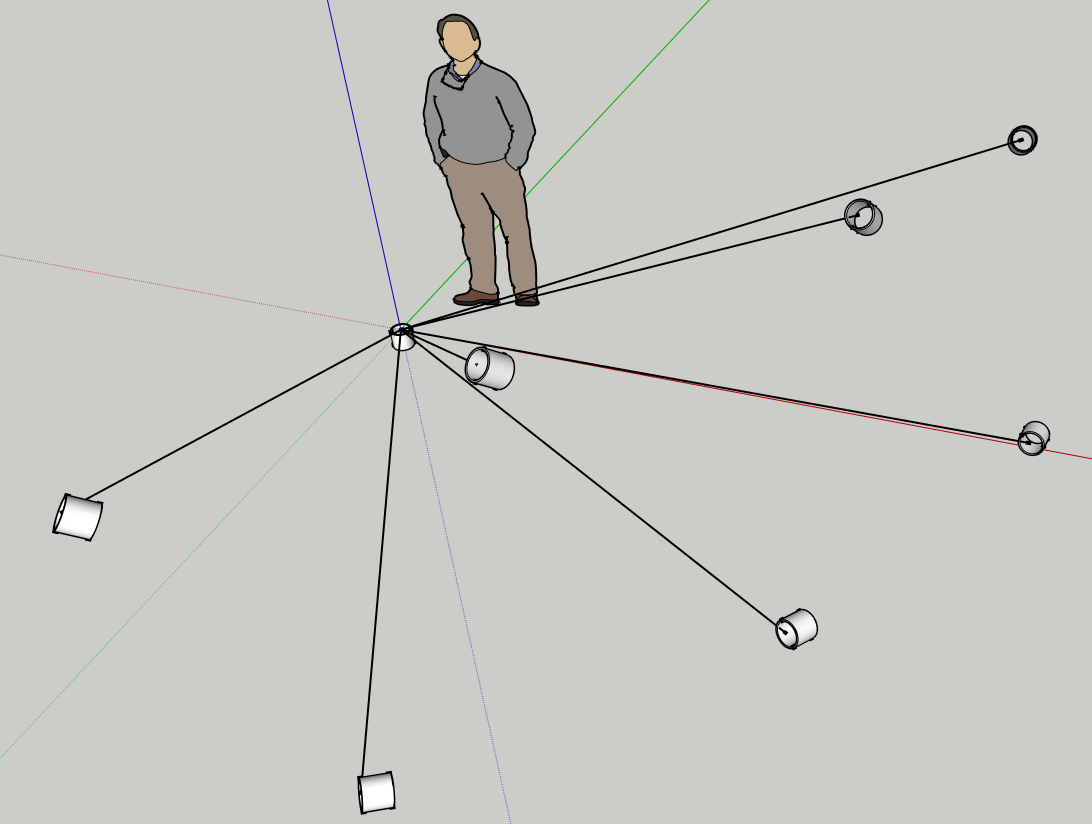
Here is the code....
p = Geom;;Point3d.new([0, 0, 0]) #Point of rotation #Create a copy, but don't move it (it needs rotating first trans = Geom;;Transformation.translation([0,0,0]) new_hub = @geodesic.entities.add_instance hub_def, trans #Create a vector pointing up the Z axis z_vec = Geom;;Vector3d.new [0, 0, 1] #Turn our target point into a vector cv = Geom;;Vector3d.new c[0], c[1], c[2] #Get the angle between the Z-axis and the vector angle = z_vec.angle_between cv #Create a rotation transform and rotate the object r1 = Geom;;Transformation.rotation(p, cv, angle) new_hub.transform!(r1) #Translate to final destination t = Geom;;Transformation.translation(c) new_hub.transform!(t) -
Hi,
The following example code aligns the object axis with line axis pretty close, its a little off but not by much...not sure why this happens.
Here is the code;
model = Sketchup.active_model ents = model.active_entities sel = model.selection @rotx = 0 @roty = 0 @rotz = 0 #change to see diferent line rotations edge = Sketchup.active_model.entities.add_line([0,0,0],[-400,700,200]) line = edge.line lend = edge.end lendp = lend.position sel.each do |e| pi = Math.acos(-1) @rotx = Math;;acos(line[1].x)*(180/pi) #/ @roty = Math;;acos(line[1].y)*(180/pi) #/ @rotz = Math;;acos(line[1].z)*(180/pi) #/ end tobject = sel[0] tr1 = Geom;;Transformation.rotation(ORIGIN, Y_AXIS, @rotz.degrees) tr2 = Geom;;Transformation.rotation(ORIGIN, Z_AXIS, @rotx.degrees) tr3 = Geom;;Transformation.new([lendp.x, lendp.y, lendp.z]) instance = ents.add_instance(tobject.definition, tr1) instance = instance.transform!(tr2) instance = instance.transform!(tr3)Note: before running code you need to have a group selected.
-
@s_k_e_t_c_h_y said:
To make it a bit clearer here is an image. I want to rotate and translate an object from a point (origin in this case) to the end of a vector. This requires a rotation in two planes and a translation...
[attachment=0:3fw9rw9b]<!-- ia0 -->rotation.png<!-- ia0 -->[/attachment:3fw9rw9b]You can do the rotations with one operation in SU so I'm presuming I'm just missing something...
Sketchy..
I think you should try the Axis Transformation, which can do it in one go.
You have the Z direction (your vector), and you need to fix the X or Y direction in the plane normal to your vector (or let SU decide by simply using an axes system based onvec.axes.Fredo
-
What fredo said, Transformation.axes sounds like the method you want to use: http://www.sketchup.com/intl/en/developer/docs/ourdoc/transformation.php#axes
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement