Automator Fredo6: 4 Gelenke zwischen 4 Teilen
-
 Klapptisch.skpKlapptisch.animator.txt
Klapptisch.skpKlapptisch.animator.txt
animator als Dateiendung mußte ich um .txt ergäzen, damit sie hochladbar war. Das .txt muß also wieder zurückgenommen werden.
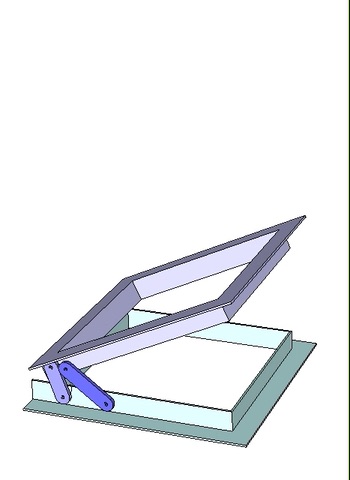
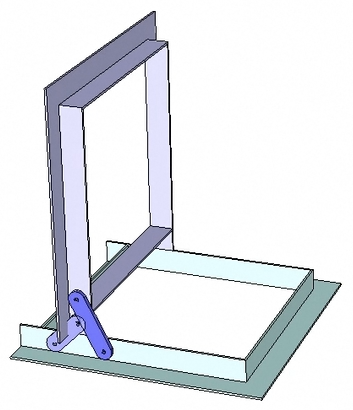 Beispieldatei mit Fredos Automator:
Beispieldatei mit Fredos Automator:Die große Klappe wird mit zwei Animationen bewegt: 1 Drehung, 2 entlang einer Steuerkurve
Die beiden Hebel: nur Drehung
Die Steuerkurve ist der Drehkreisausschnitt (90 Grad) des kleinen HebelsFrage:
Kann der Automator die tatsächliche Steuerung des zweiten längeren Hebels darstellen?
Dazu müßten zwei Teile drehend gekoppelt werden können. Dazu fand ich keinen Automator-Ansatz (bin aber auch noch Anfänger).
Hier sind 4 Teile mit 4 Gelenken mechanisch verbunden, aber nur 3 Teile konnten sozusagen mechanisch koordiniert werden. Das 4. Teil, der längere Hebel, schlackert sozusagen nur zeitlich mit, steuert aber nicht. -
Zwischenzeitlich fragte ich Fredo und bekam dessen Hinweis auf MSPhysics, das seitdem intensiv geübt wird.
Tja, MSPhysics kann wohl alles in Bewegung setzen mit Motor, Gelenken, Schiebern/Gleitbahnen/Slider. Ich kriege das Wackeln nicht raus. Und unübersichtlich viele Einstellmöglichkeiten, alle auf englisch. Da kapiere ich noch nicht genug.
Ich suche mal, ob es hier speziell für MSPhysics eine Abteilung gibt. In youtube-Filmen fand sich schon einiges Nützliches. Aber Fragen werden wohl hier im Forum genauer beantwortet. Danke, Forum!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement