MSPhysics tests and questions
-
@ecati said:
It works perfectly. I didn't see any problem.
Click on the picture for animation.- English: Hello, I can't get the keyboard commands to work either. I am using a drinking PC with Windows 11, sketchup 2018 and I have installed the ams_Lib.rbz_v3.7.1b.rbz library and MSPhysics_v1.0.3.rbz. The problem is the same on my other laptop running Windows 10. Can you help me? Thank you in advance.
- Français: Bonjour, chez moi non plus, je n'arrive pas à faire fonctionner les commandes au clavier. J'utilise un PC potable avec Windows 11, sketchup 2018 et j'ai bien installé la librairie ams_Lib.rbz_v3.7.1b.rbz ainsi que MSPhysics_v1.0.3.rbz. Pour info le problème est identique sur mon autre PC portable équipé de Windows 10. Pouvez-vous m'aider? D'avance, merci.
-
@ecati said:
It works perfectly. I didn't see any problem.
Click on the picture for animation.Hello, I can't get the keyboard commands to work either. I am using a drinking PC with Windows 11, sketchup 2018 and I have installed the ams_Lib.rbz_v3.7.1b.rbz library and MSPhysics_v1.0.3.rbz. The problem is the same on my other laptop running Windows 10. Can you help me? Thank you in advance.
Bonjour, chez moi non plus, je n'arrive pas à faire fonctionner les commandes au clavier. J'utilise un PC potable avec Windows 11, sketchup 2018 et j'ai bien installé la librairie ams_Lib.rbz_v3.7.1b.rbz ainsi que MSPhysics_v1.0.3.rbz. Pour info le problème est identique sur mon autre PC portable équipé de Windows 10. Pouvez-vous m'aider? D'avance, merci. -
Hello Anton or Anyone who could explain me for the problem.
I've use SketchUp 2017 for long time together with MSPhysics (right now is version 1.0.3).
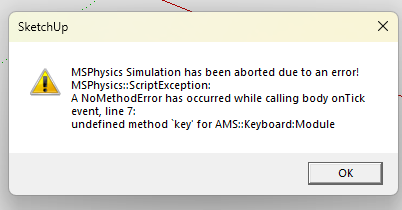
They worked well and thank you very much to Anton that create a super good extension.But suddenly, the models that I using with MSPhysics has problems on running scripts that has user interaction such as using keys and mouse buttons. Everytime I run the script, it pop a window like shown here.
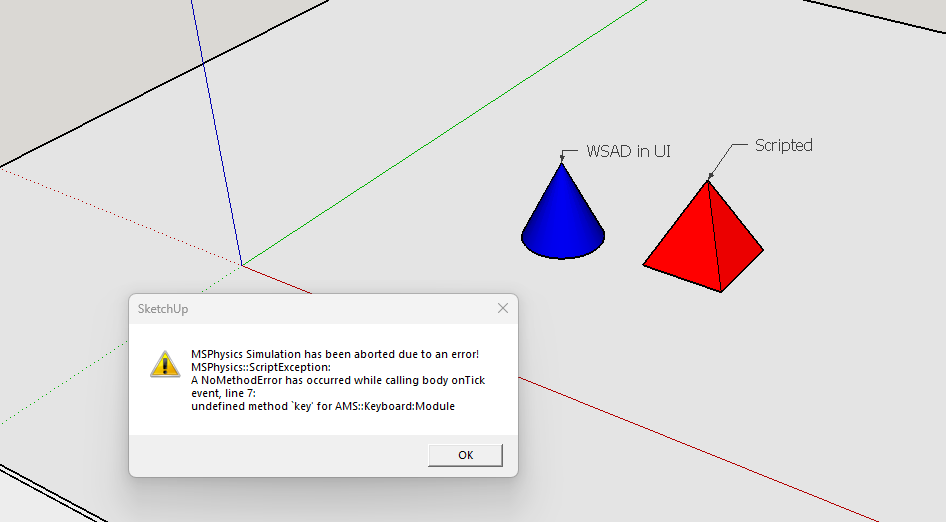
I think, my problem is the same like "DanyLecoeq" and "hmau26" that they've posted before.
-
@i-ss said:
Hello Anton or Anyone who could explain me for the problem.
After long period of waiting. I've try to down-version of ams_lib from v3.7.1b (the last one, I think) to v3.5.2
Then all back to work !!!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement