Group moves to origin when I doubleclick to select component
-
It happens because when you are in the group's edit context, you are within the group's co-ordinate system. So the SketchUp interface shows you the axis anchored on the group's origin.
BUT... the world origin remains unchanged.
-
See
group.transformation.origin
and theGeom::Transformationclass, in the online docs. -
Dan, Thank you for your reply.
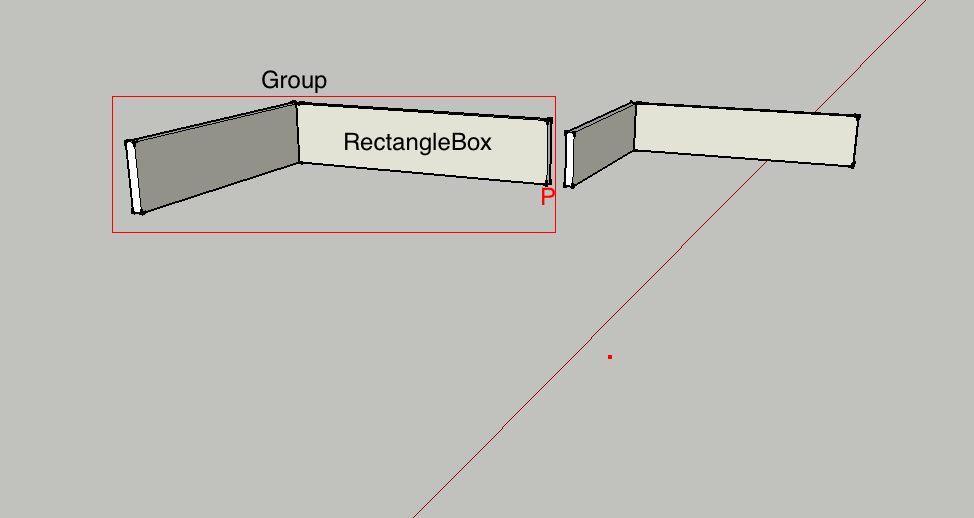
Origin of the group
g.transformation.originis (150, 10, 3). One of the corners' (say P) coordinate of RectangleBox is (19, 0, 0). (RectangleBox is ComponentInstance and belongs to the group.Seeing the value (19,0,0) and the position of the point P, it is clear the coordinate is with respect to the Group's coordinate system. So I need to add the group's origin to get the coordinates of P in Sketchup coordinate system. That would be - (169, 10, 3).
Question: This looks like the hard way. Is there any direct way?
Let me give you the actual picture.
Problem I am trying to solve: Find all the faces that are touching (in contact with) other faces in the selection.The approach
- I get all the plys (RectangleBoxes i.e., ComponentInstances) in the selection (Recursive solution).
- Then I get all the faces of the plys
- I go on to compare each face against every other face to see if they are in contact. If they are then I add it to the resulting array.
**Another query:**In
get_extremes_of_facemethodface.verticesreturns vertices with respect to the Group's origin. And this is where i will need to offset the origin of the group to get the 'absolute coordinates'. But is there a better way to do this?def get_all_faces(ply) entities = ply.definition.entities all_faces = [] for entity in entities if entity.instance_of?(Sketchup;;Face) all_faces << entity end end return all_faces end def is_face_coplanar_to_another?(face1, face2) face1_extremes = get_extremes_of_face(face1) face2_extremes = get_extremes_of_face(face2) if(face1.area > face2.area) val = check_if_one_extremes_contain_another(face1_extremes, face2_extremes) else val = check_if_one_extremes_contain_another(face2_extremes, face1_extremes) end return val end def get_extremes_of_face(face) vertices = face.vertices i = 0 array = [] x_value1 = [] y_value1 = [] z_value1 = [] for ii in (0..3) array[i] = vertices[ii].position x_value1[i] = array[i][0] y_value1[i] = array[i][1] z_value1[i] = array[i][2] i += 1 end x_min = x_value1.min x_max = x_value1.max y_min = y_value1.min y_max = y_value1.max z_min = z_value1.min z_max = z_value1.max value = {;x_min => x_min,;x_max => x_max,;y_min => y_min,;y_max => y_max,;z_min => z_min,;z_max => z_max} return value end def check_if_one_extremes_contain_another(ex1, ex2) if (ex1[;x_min] <= ex2[;x_min] && ex1[;y_min] <= ex2[;y_min] && ex1[;z_min] <= ex2[;z_min]) if(ex2[;x_max] <= ex1[;x_max] && ex2[;y_max] <= ex1[;y_max] && ex2[;z_max] <= ex1[;z_max]) return true else return false end end return false end -
OK some basic Ruby. Most Ruby collection classes have the
Enumerablemixin moduleincluded within them.You can always check via the
ancestors()method (which will list mixed in modules, at the point in the class hierarchy when they were mixed in.)
Sketchup::Entities.ancestors %(#004040)[>> [Sketchup::Entities, Enumerable, Object, JSON::Ext::Generator::GeneratorMethods::Object, Kernel, BasicObject]]
(Notice also that moduleKernelis mixed into every Ruby class, by it being mixed intoObject.)So, use the
grep()method from moduleEnumerable, because it is very fast.
It can replace this entire method:def get_all_faces(ply) entities = ply.definition.entities all_faces = [] for entity in entities if entity.instance_of?(Sketchup;;Face) all_faces << entity end end return all_faces endwith:
all_faces = obj.entities.grep(Sketchup::Face)If
grep()does not find any objects of that class, or it's subclasses, then it returns an empty array.But,
grep()also has an optional block form, in which the result array is passed into a block if supplied:all_faces = obj.entities.grep(Sketchup;;Face) {|faces| faces.each {|face| # check something about each face here } }
-
@bobdiya said:
Seeing the value (19,0,0) and the position of the point P, it is clear the coordinate is with respect to the Group's coordinate system. So I need to add the group's origin to get the coordinates of P in Sketchup coordinate system. That would be - (169, 10, 3).
Question: This looks like the hard way. Is there any direct way?
Nope. (It is something coders have asked for forever, but has not been added to the API.)
So coders need to apply each nested level's transformation to get the world co-ordinate:
worldcoord = inst.transformation.origin.transform(grp.transformation) -
@bobdiya said:
The approach
- I get all the plys (RectangleBoxes i.e., ComponentInstances) in the selection (Recursive solution).
- Then I get all the faces of the plys
- I go on to compare each face against every other face to see if they are in contact. If they are then I add it to the resulting array.
Component Instances do not "have" faces, because they do not "have" entities collections.
It is the Component Definition that has the entities collection.
ALL instances of THAT definition shares the entities. Edit one of the instances, and you edit them ALL.
So you need only get the faces once, and hence the relative vertices once.
-
I would think it faster to use Face.classify_point() to check if vertices of one face, lie upon another face.
-
@dan rathbun said:
@bobdiya said:
Seeing the value (19,0,0) and the position of the point P, it is clear the coordinate is with respect to the Group's coordinate system. So I need to add the group's origin to get the coordinates of P in Sketchup coordinate system. That would be - (169, 10, 3).
Question: This looks like the hard way. Is there any direct way?
Nope. (It is something coders have asked for forever, but has not been added to the API.)
Given a single vertex you cannot return a world coordinate since it could belong to an Entities collection that might appear several places in the model.
You need to have the combined transformation of the specific path you want the world coordinate for. I don't see what type of method would improve over what one already do (collecting the nested transformation.) Suggestions are welcome. -
@tt_su said:
You need to have the combined transformation of the specific path you want the world coordinate for. I don't see what type of method would improve over what one already do (collecting the nested transformation.) Suggestions are welcome.
You know that is exactly what we'd like.
We would like the heavy work done on the C-side, so it is fast, and we only need call a single method.
-
Like an optional argument in Vertex.position perhaps - that takes a transformation argument?
-
Also, do anyone have a test script where current solution is slow?
-
@tt_su said:
Like an optional argument in Vertex.position perhaps - that takes a transformation argument?
Brainstormin'Umm. I was thinking more of a
.world_position()instance method forGroupandComponentInstanceclasses.
But this may not be the most helpful.Maybe think more of working in "Local" and "World" modes.
And we gave a block formworldand (maybe)localmethods.
(Sort of the old "with this do that" construct.)component_instance.world {|inst| # any vertice, point3d, vector3d, etc., # accessed within block is in world co-ordinates }?
-
@dan rathbun said:
@tt_su said:
Like an optional argument in Vertex.position perhaps - that takes a transformation argument?
Brainstormin'Umm. I was thinking more of a
.world_position()instance method forGroupandComponentInstanceclasses.
But this may not be the most helpful.Maybe think more of working in "Local" and "World" modes.
And we gave a block formworldand (maybe)localmethods.
(Sort of the old "with this do that" construct.)component_instance.world {|inst| > # any vertice, point3d, vector3d, etc., > # accessed within block is in world co-ordinates > }?
Seems to me that to avoid complete chaos for Components, it would need to be necessary either to make any "world" version of the Component read-only or else to intercept all of the setter methods on Entities and apply the reverse transformation back to the ComponentDefinition's "local" coordinates. Otherwise, any modifications made to the "world" version within the code block would create a mess in the ComponentDefinition! This seems like a terrible amount of complexity and risk of bugs!
Here's a different idea: what if there was a "export_to_world" method on ComponentInstance that would create a new Group containing copies of the ComponentDefinition's Entities transformed into "world" coordinates per that ComponentInstance's Transformation(s)? Because the copy's Entities would no longer be shared with the ComponentDefinition, there would be no risk of messing it up. Alterations made to the Group would not affect the ComponentDefinition or any of its ComponentInstances.
Steve
-
Steve, my original idea is morphing into something overly complicated.
I never wanted to imply a "world edition" of any
GrouporComponentInstanceinstance object.I really meant that the
origin(which is actually a property of a transformation object,) be returned in world co-ordinates instead of local co-ordinates. (So the instance object is not changed.)But this only within some scope mechanism. (A method block is only one such example.)
Copying an instance into the world model entities, is easy enough now.
I did not intend something that modified the model directly. I was aimed at simplifying virtual calculations.
-
@dan rathbun said:
@tt_su said:
Like an optional argument in Vertex.position perhaps - that takes a transformation argument?
Umm. I was thinking more of a
.world_position()instance method forGroupandComponentInstanceclasses.Oh.. sorry (brain fart)
Yes the
position()method is on theVertexclass, so the proposedworld_position(), would also have to be upon this class.
I do not known what would be better, a new method, or adding an optional:worldsymbol (or"world"string,) argument. (I DO know I hate positional boolean args, so I'd rather not see a defaultfalsearg, that we need to passtruein order to get world co-ordinates.)Above, where I ponder about a scope (or method block,) ... creating any of the "virtual" dimension classes (in module
Geom,) would return new object using world co-ordinates,. instead of local co-ordinates.So in such a block
edge.start.postion(for an edge that was nested at some level,) would return a newGeom::Point3dinstance, but it's x, y, z would be set to world co-ordinates. -
@dan rathbun said:
Steve, my original idea is morphing into something overly complicated.
I never wanted to imply a "world edition" of any
GrouporComponentInstanceinstance object.I really meant that the
origin(which is actually a property of a transformation object,) be returned in world co-ordinates instead of local co-ordinates. (So the instance object is not changed.)But this only within some scope mechanism. (A method block is only one such example.)
Copying an instance into the world model entities, is easy enough now.
I did not intend something that modified the model directly. I was aimed at simplifying virtual calculations.
So I guess I miss the point of the code block you suggested...what would it be iterating over?
-
There is NO rule that states that code blocks must be iterative!
For example, normal
begin...endordo...endcode blocks are not themselves iterative. Nor aredef...endcode blocks iterative.A block of code is a scope mechanism. It can be iterated by calling it multiple times from an iterative expression such as
for. Or a method block, can contain aforexpression that calls a passed code block using ayieldexpression.What I am proposing is most like the new Ruby 2.0
usingkeyword, and the refinement construct. In fact I said that above, where I called it a "with this do that" concept. -
@dan rathbun said:
Yes the
position()method is on theVertexclass, so the proposedworld_position(), would also have to be upon this class.But you cannot return a single world position for a vertex unless you have some extra info. If the vertex belong to a definition with multiple instances there are multiple possible world positions.
And there was some mention of performance concern - did anyone have a sample script of this?
-
@tt_su said:
But you cannot return a single world position for a vertex unless you have some extra info.
RIGHT.. I gotcha'
We would need to let Ruby know the parent instance's transform. (Not automatic unless in user edit mode.)
I guess we can do this now. We just create a copy of the instance's transformation, call it
**t**:
world_pt = edge.start.position.transform(t)
I guess I was pondering how to automatically call#transform(t)upon all newly createdGeom::Point3dinstances, within a code block scope.So, yes I suppose an optional "tranform" class argument for
Vertex#positionwould be handy. (It could be aGeom::Transformationinstance, aGeom::Vector3din world context, OR either anArrayorGeom::Point3doffset fromORIGIN.) So it could look like:
world_pt = edge.start.position(t)(2) So lets say you have collected a series of vertices (in an array
verts.) And you want their world co-ordinates:
world_pts = verts.map {|v| v.postion(t) }We have to use map, because the API's
Array#tranform()andArray#tranform!()methods, refuse to apply a transform to an array with anything other than than 3 numerics.
Even though each individual element has a transform method.Example, you have an array of
Geom::Point3dobjects, and you want to transform ALL elements the same.
The Array class transform methods should do this IF the the elements are not numeric, and theyrespond_to?(:transform). (Add: Any element that does not "respond_to" is returned unchanged.))
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement