MSPhysics 1.0.3 (16 October 2017)
-
-
-
Hello, Ecati,
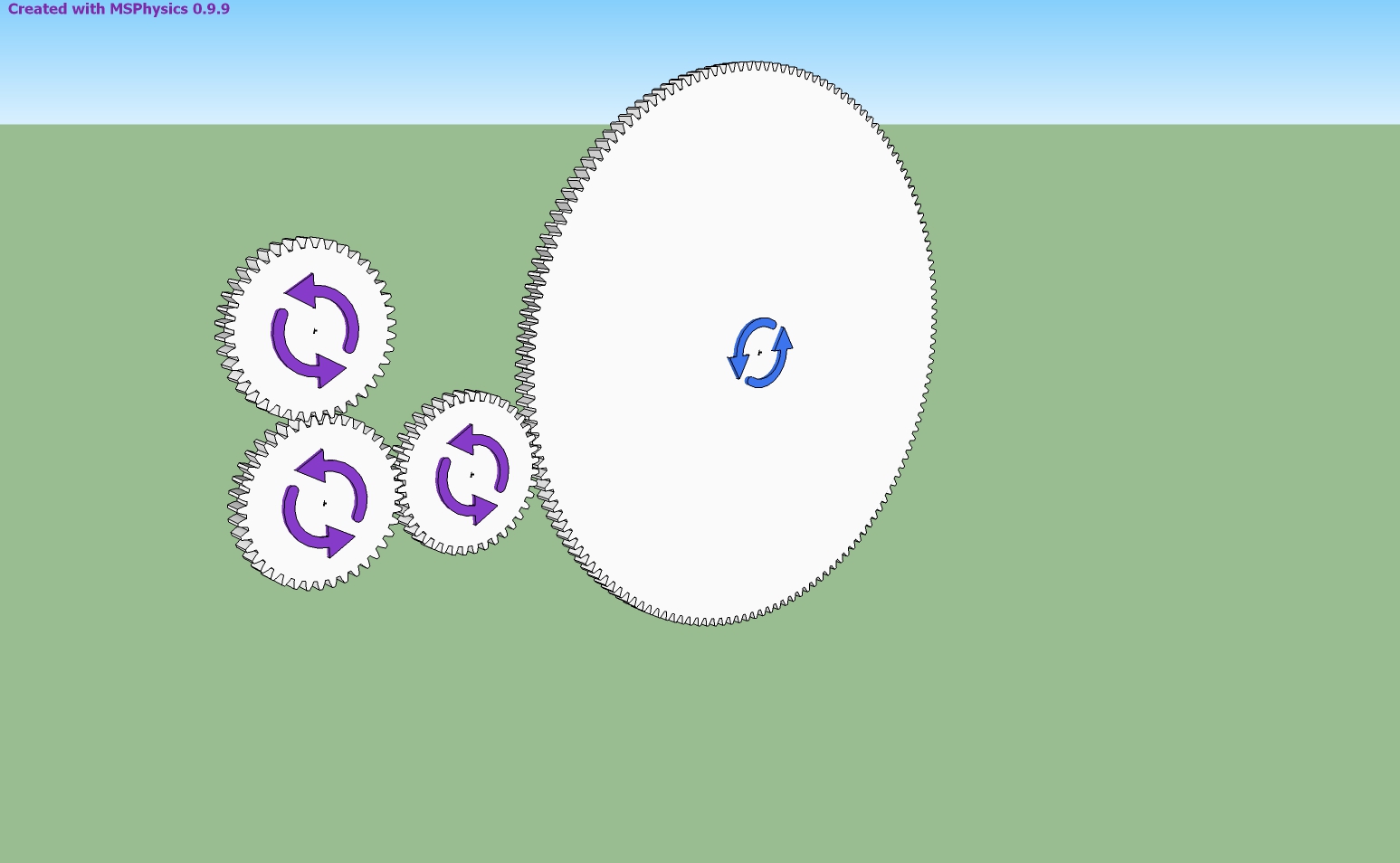
For the first one, try setting material thickness of simulation tab, in the MSPhysics UI, to zero. It will improve the behavior by a bit. But because the gears are too small, the collision intersections aren't quite proper. You could increase world scale, say to 40, which should result in an improved behavior, but it will unfortunately result in a crash. I will try to fix that scaling bug before releasing 1.0.0.
For the second one, you can increase update rate, to say 4, and/or reduce update timestep, to say 1/120. The smaller the update timestep is, the more accurate the simulation is. The smaller update timestep should prevent collisions from deteriorating. Both of the settings can be adjusted through the Simulation tab of the MSPhysics UI dialog. After you do these, increasing the motor speed should have things running properly.
Nice examples by the way. I'm stunned with your improved MSPhysics skills.
Regards,
Anton -
Is it possible to do servo controls via the msphysics API without writing a script?
-
It depends on how complex you want the controller to be. The simplest one is the slider controller. You can generate it by pressing the generate slider button in joint UI. Others are controlling with key, like key('f') as noted in some prior post. You can also write a function of time dirctly into the cpntroller, like:
t = world.time; cos(t)*5There are many controllers you can write without relying on the MSPhysics scripting API. -
I'm really enjoying MSPhysics plug-in and have been following Sam Ketner's very insightful tutorials on Youtube. I'm wondering if there is a manual easily available, so I can bone up on some more stuff. More pressingly, I'm wondering how to attach one hinge with a bar (which appears to be in a fixed point) on a bar attached to another hinge... so that it is freely movable. I'm trying to draw an umbrella-like hinge at the moment and I'm stuck.
-
Hi, Anton,
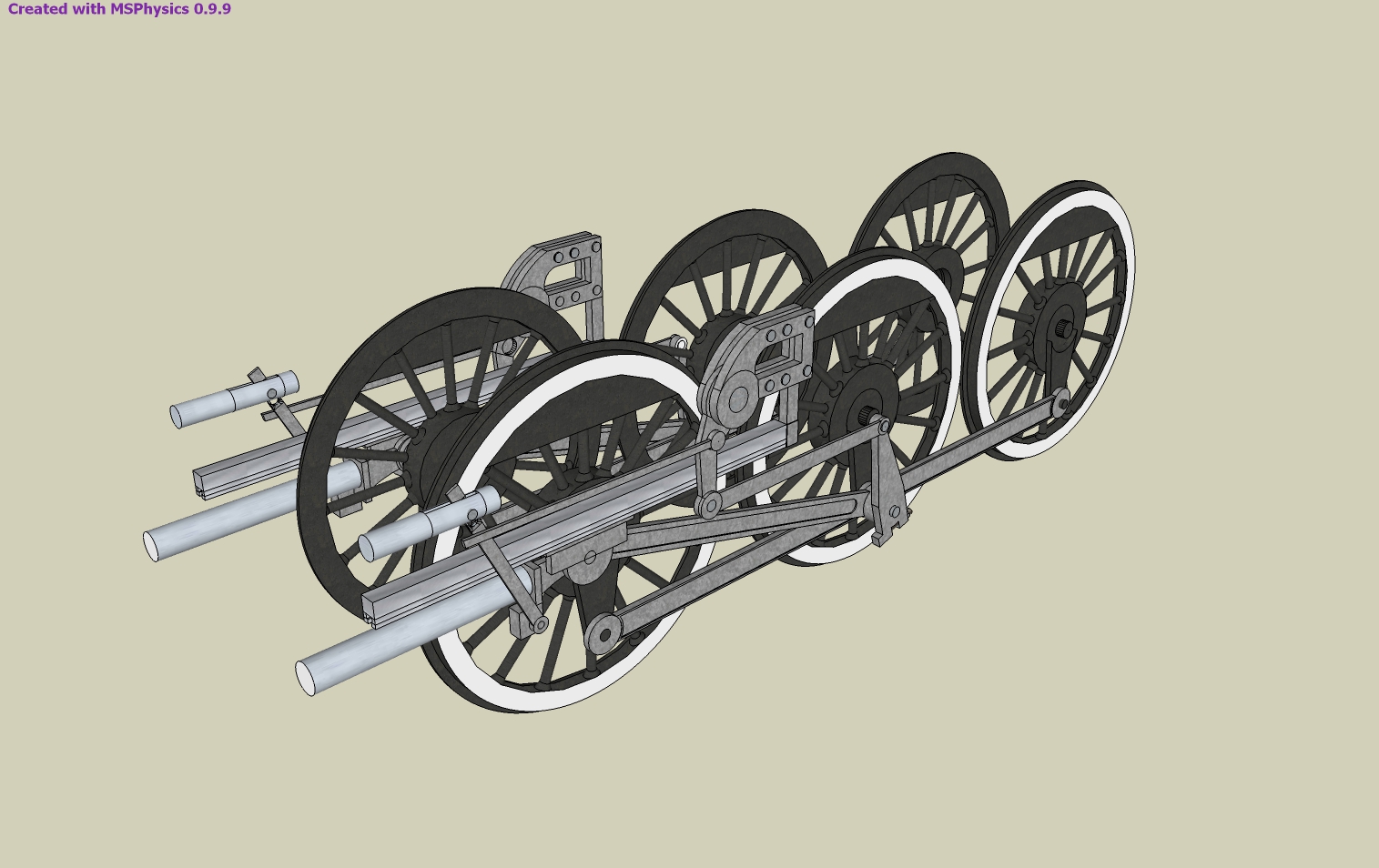
I made this file by taking advantage of the Planned Steps.skp file you have prepared. I want the movement to begin when the space key is pressed and continue and stop until the space key is pressed again.
-
@ecati said:
I made this file by taking advantage of the Planned Steps.skp file you have prepared. I want the movement to begin when the space key is pressed and continue and stop until the space key is pressed again.
This command will be available in MSPhysics 1.0.0. Basically you will utilize the
toggle_key('space')command. It will be released soon. -
@wolfy_71 said:
I'm really enjoying MSPhysics plug-in and have been following Sam Ketner's very insightful tutorials on Youtube. I'm wondering if there is a manual easily available, so I can bone up on some more stuff. More pressingly, I'm wondering how to attach one hinge with a bar (which appears to be in a fixed point) on a bar attached to another hinge... so that it is freely movable. I'm trying to draw an umbrella-like hinge at the moment and I'm stuck.
To create movable hinges, you have to create them within the context of a desired parent group/component. Then connect it to the desired child group/component (using the MSPhysics Joint Connection Tool). That way the parent group will move and the connected child group will move relative to the parent group, while rotating around the hinge axis, which will also be relative to the parent group.
-
Hello, I would like to create text that does not of the world of the !! Example: the objects far from the center of the axis!
And I would like to create lines, shapes, points !! A radar...
-
SynSuka3D, you should explore SketchyPhysics models at 3DWarehouse on that and then write a similar script for what you want. For instance, a Radar by Mr. K: https://3dwarehouse.sketchup.com/model/c8b415a0bbb385b87e683c55e87c0665/Radar-3
-
Thanks Anton_S,
But I would like a radar of this style !! Of my model Sketchyphysics for MsPhysics!https://3dwarehouse.sketchup.com/model/dc1774c9431e40bad9689dffd6e75da7/Avion-2-sp-No-Gyro
-
Well, same applies to that UAV. Just convert the code to MSPhysics. All tick tabs must be converted to
onTick {...}in script all touch tabs must be converted toonTouch { ... }in script the rest code is just converting SP functions and concepts to MSPhysics. -
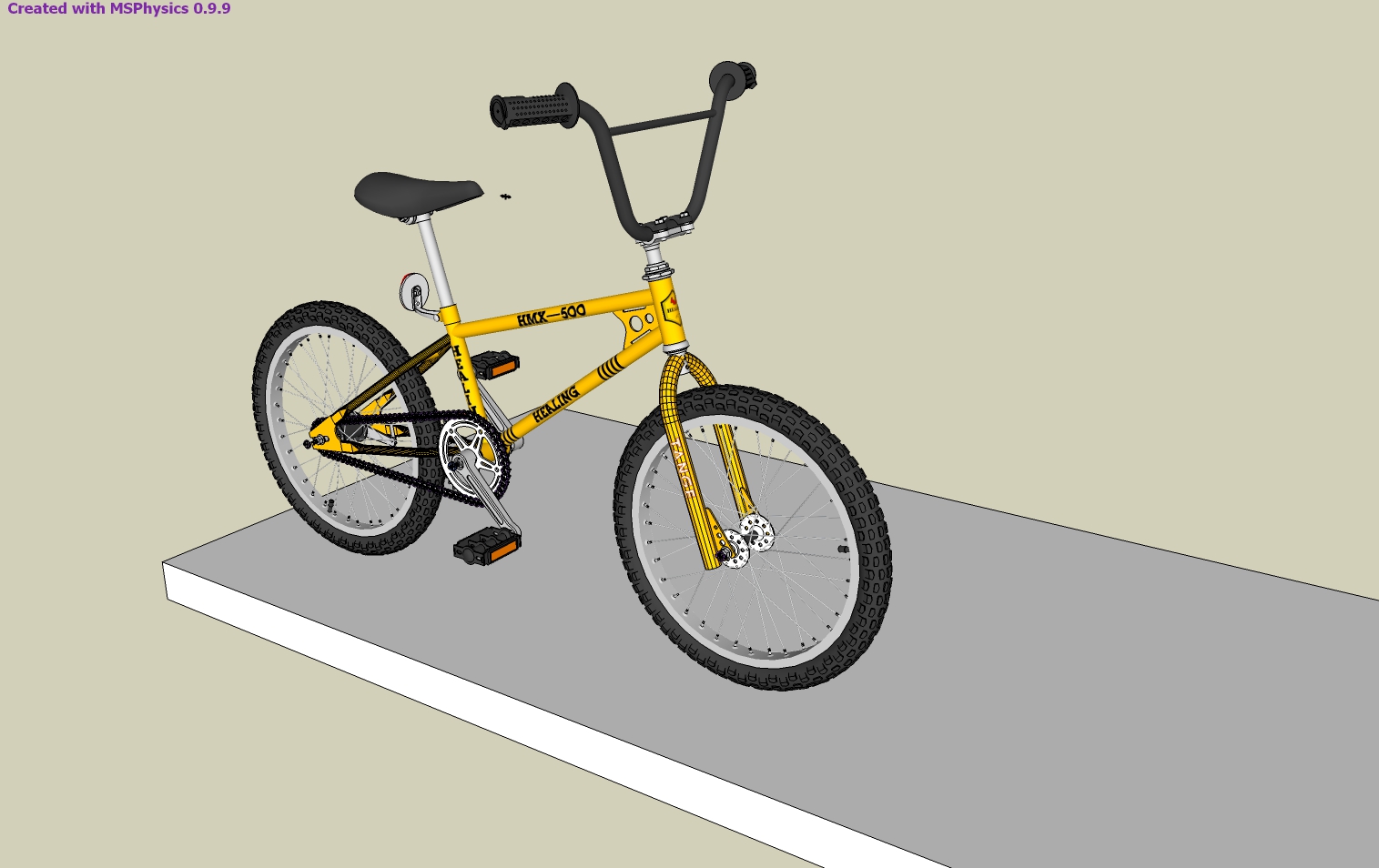
I'm trying to move this bike. But I have not been fully successful. What I do not know, what I know wrong and what my mistakes are? Thank you.
-
Ecati, that's too much joints and collisions. MSPhysics can't handle that much, especially that joints are weak and unstable when are linked into chains. If your intent is to simply play the bike, you should take an approach of making games, where only the essential parts are made to work. All you need is the frame (set to convex hull) and two wheels (set to to sphere shape). The rest could be removed or placed within the frame and set to ignore. Then a few joints, one for steering and two for motors, would guarantee you a fast working bike. But, if your approach is to simulate how the bike works, with all the moving parts, then MSPhysics is definitely not a plugin for that.
-
Hi, Anton,
My purpose is to move the bike by chain, just like it is in a real bicycle. If I understand correctly, it is not possible to do this with MSPhysics. Is it true? -
Ecati,you understood it correctly.
-
Hello !! Ecati try group the chain in another way something like like the file here ..and when you run MSPhsics delete guides( Edit>delete guides)this will make it run faster ..make a copy of your file first ...
-
Hi, Cristyan,
I applied your suggestions. But there has not been any improvement.
-
The model in the attached file hangs and disintegrates after a period of working properly. What would be the reason?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement