Multiple joints and changing statuses.
-
Desperate measure, one zip file. Hope this works.
-
Here, I got it all fixed!
- Your model was reduced up to 4 times in size, simply by purging unused definitions. I suggest you to use TT Cleanup plugin for that...
- There were many faces that were misoriented and not intersected with other faces, which prevented many groups from being solids.
- There are many sketchyphysics flaws you had in the model, but how could I expect it to be perfect when there are no documentation rules or what so ever. I fixed it all up, and hope you can find various things you did wrong. I don't want to explain every single detail, but hope you can figure it out after some good experience.
Anyway, here is the model. I added two slider controls. One to lift wheel and the other to rotate it.
-
Thanks Anton. This raises more questions.
I purged every group with the built in purge function and used SolidSolver to check them out. So what's happening there. Could I have a problem within my program?
I will download the plugin you've suggested to check some other models.Your solution, whilst proving it can be done, is, I'm sorry to say, incorrect.
The control lever servo, the 'over-center' assembly center hinge and the nose-wheel leg bottom hinge, should all be connected to the 'wooden structure' ie, the airframe. They are not so the model works in a curious way. I'm not at all worried about movement on the ground other than, if model, to prove that the over-center assembly does actually lock. At the moment it only half closes. I will try to correct it with out stuffing up your work.
Cheers, Doug -
Me again Anton. Been looking at fixing my problems but have come upon a wall. You've hidden the joints and I can't find any info on how to un-hide them. Looked at 'sections' but that's no help. What plugin do you use?
I've found one reason that stops the wheel from fully lowering. The 'u' shaped fulcrum on the lever it too shallow and jams so as to prevent the lever going fully forward. I have increased the length of the 'u' shaped part whilst keeping the group the same length. In doing this, I've lost your servo and joint connections.
Can you spare the time to guide me please.PS, I can't see new joints if I try to make one.
-
When I uploaded the model, most of your groups were solids. The reason you didn't see some of them as solids was because they consisted of multiple groups, i.e a group consiting of grouped lever and two joints. You have to go to the deepest level group which contains lines and faces geometry, and then check if its solid, but there is no need to do that. SketchyPhysics aint cares if the group is solid or not. As long as you set shape to convexhull2, or compound2, your group will generate proper collision.
To see the joints, open the layers dialog in Window > Layers, and check the Physics Joints checkbox option. When playing with the model it's a good practice to turn off physics joints layer so joints don't distract the view.
Right now, I have trouble figuring out which lever looks like a 'u'. I might need to return to first grade and relearn the alphabet.
 Can you upload the model once again (through the private message if you wish) and I will fix it all up. Along with that I will provide some explanation, so you have some idea of fixing such things yourself.
Can you upload the model once again (through the private message if you wish) and I will fix it all up. Along with that I will provide some explanation, so you have some idea of fixing such things yourself. -
Hi Anton. I want to make some changes and improve some of my modelling. Then I'll resend the file but if you don't mind, please keep it on line so that others may learn from what you have to say. give me a day or so.
Cheers.
-
No problem. I'll be glad to fix it.
-
Anton, I've tried, my God I've tried. How the hell do you do it. LOL
Firstly let me explain the changes to my model.
I've reworked some of the parts. Yes, there were(and still are) many modelling errors.
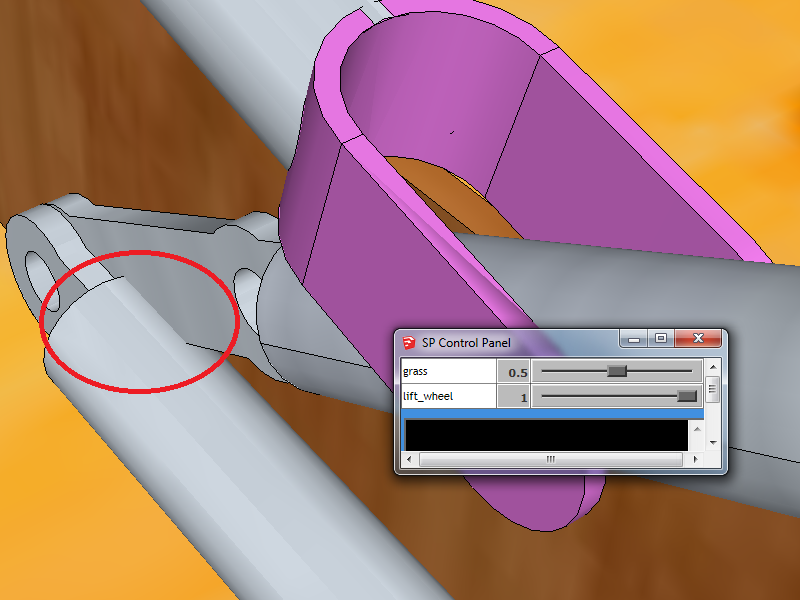
The 2 blue parts make up the 'over-center' lock (o/c).
The purple part is the 'u' you couldn't see. This was originally jamming with the lever when in fully forward position. I've lengthened the tongs.
All parts cleaned up with ttcleanup2(not that I fully understand that particular plugin).Now, this might be a step too far but I want to see the operation of the o/c assy when the Earth is moved away. Look closely and you'll see that the weight of the aircraft holds the 2 upward pointing thumbs in contact and thus locked (middle pivot is lower than the 2 end ones). This didn't happen in the previous version as the thumbs intersected each other (not solid).
By 'taking off' (lowering the Earth) the o/c lock should automatically align all 3 pivot points. This is prior to moving the lever. i.e. the wheel must have weight to pull it into it's free position.The lever needs to be set so that it starts at it's zero point (not mid point) with lever fully forward. Hopefully, the wheel will rise to a point where just an inch or so is still below the blue foam (covered with F/glass)lower fuselage. This is so that in the even of a wheels up landing, the skin isn't dragged along the ground. Main wheels will be same.
If my geometry is wrong, the whole thing should jam up, but I hope not.
For my benefit and those others following this thread, can you explain how you decide the order in which you do things and why.
Asking too much, I hope not.
-
To make things easier for you to understand, I decided to create a video: https://www.youtube.com/watch?v=qw2C9goxbNk
I'm currently in the process of adding description annotations to the video. Edit: Done
Here is the model:
over-center_lock_mechanism.skp
Hope it can teach something. -
Nice video!
-
Thanks Anton. Very nice presentation and result. You mis-understood the use of the grass but no matter. That was only an extra. The main thing is that the system will work in reality.
Next question, if I add the main wheel systems to this, will I loose your current 'state' for this part? I would need to edit the sliding tube and then add the rest of the system. -
@deskpilot said:
The main thing is that the system will work in reality.
I know (as you stated) this mechanism is not finished, but I wanted to inform you of a minor flaw. Just so you get it fixed before you start preparing some parts...
@deskpilot said:
Next question, if I add the main wheel systems to this, will I loose your current 'state' for this part? I would need to edit the sliding tube and then add the rest of the system.
Well, if you explode the sliding tube group which is connected to two joints, the connection data will be lost, along with that all the properties, such as script, state, and shape would be lost too. So, once you regroup it once again be sure to reconnect it to its original joints, set it noncollidable, and add script to set it an identical mass. However, you won't need to update properties for the rest of the system as long as you don't explode the parts of the rest of the system. But if you do explode, just do what you need, put it back in group, and reapply the properties. It will be very easy if you get some experience.
-
Thanks Anton. I hadn't noticed that group conflict.Will fix it when I'm ready to add the rest of the system.
Again, thanks for your tuition, just hope my 72 year old brain can remember it.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement