MSPhysics 1.0.3 (16 October 2017)
-
Hello, Jon,
The concept of joints in MSPhysics is similar to SketchyPhysics. If you check out YouTube tutorials on joints in SketchyPhysics, same things could be accomplished through MSPhysics in a similar way, just through using MSPhysics tools.
So, to create a joint that is relative to another group, first, all arms should be top level groups. Then, within the context of each arm, add a joint and connect it to the next arm. Here, I made a quick tutorial on adding joints to a robot arm:
For the tutorial, I used the latest version of MSPhysics, which I haven't released yet but the way of doing it is not any different from the current version.
I know MSPhysics lacks the tutorials on many of its features, but that's because it is still under development. Making a tutorial with an unstable version, would make it obsolete when a better, stable, and more user-friendly version of MSPhysics is released; therefore, I want to finish the stable version first before proceeding to tutorials.
Best regards,
Anton -
Amazing reply, thank you so much!
-
@Anton_S cough cloth cough simulator clears throat
-
Hi, Juju! I started working on Drape a few weeks ago. I first wanted to use NewtonDynamics for cloth but then figured to write my own specific purpose physics engine instead. I already got the cloth working. All I need to do now is add contacts and the user interface. Adding the collision contacts is the hardest part, but I'm researching that.
-
Announcing MSPhysics 1.0.0!
This version comes with a significant amount of improvements and a few new features. Main feature is a custom automated transitioning of scenes, which can transition forward, backward, and loop. Here is a model demonstrating it:
Planned Steps.skp
A detailed list of other features and bug fixes can be found here: http://www.rubydoc.info/github/AntonSynytsia/MSPhysics/file/RubyExtension/MSPhysics/CHANGELOG.mdThis requires installing AMS Library version 3.5.0, which is referenced in first post. If you received development versions of AMS Library, you must upgrade to the latest one.
Also, you no longer have to bother removing original versions as the overwriting should work fine now.
I have removed geared joints feature until the next release, as it was the only thing that preventing me from releasing this version.
And one more thing, models creating with prior MSPhysics version might work differently/be incompatible with this version. Make sure to update your models' physics properties and scripts if necessary.
-
Hi Anton, thanks for the great improvements!
Keyboard navigation and scenes animation are great new features and work very well. It would be great if the scenes excluded from the SketchUp animation are also excluded from MSPhysics (e.g. EDIT scenes or the like).For rendering single images, I usually set 30 frames per second. All previous scripts, for example for programmed emitters, refer to this in terms of lifetime. What image rate does MSPhysics use for internal calculation and export, if I want to convert the previous lifetime settings in seconds?
Adjusting the settings and rewriting the scripts will probably take me a while longer. First small test example see at post "MSPhysics Tests and Questions".
-
How to convert a model created with MSPhysics 0.9.9 to 1.0.0.
-
Faust: I fixed it. Update to 1.0.1.
Ecati: It depends on a model. If your model is working properly, then there is nothing necessary to update; otherwise, adjust the properties of joints, body properties, like emitters, and scripts (if any). If you have trouble doing so, post a model in "MSPhysics Tests and Questions" thread if you need help.
-
Camera Follow Tool: Can I hide the highlighted selection?
The Camera Follow and Target tools work by right clicking the required entity as the target to follow during the simulation.
The selected item is highlighted in a blue box.

Is there any way to suppress the highlighting while the simulation is running?
-
Left-click on the sky/background to suppress the highlighting. You can't unfortunately hide the group from the menu though. I should've thought of adding this command.
-
thanks Anton, that works fine
MSPhysics is truly awesomei am keen to learn more about scripts
-
Is there a way to utilize multi core processors with msphysics?
-
@jb1016 said:
Is there a way to utilize multi core processors with msphysics?
Probably not. When I compiled Newton, I disabled multi-threading, due to issues encountered with it. I will try to enable multi-threading in the next release.
-
Is it possible to move or rotate a model with a joint connected to it?
Please click on the picture.
-
Making relative joints is easy if you know the concept. Here is how it's done: https://drive.google.com/open?id=0B3qg8f4WrNdHUDJrTUsybmU0NGs
-
Hello Anton,
What is to do to get faces (not in a Group), scripted during MSPhysics simulation, handled in MSPhysics Replay?
They are displayed during the simulation and disappear in replay and also in the animation export.
Thank you in advance. -
Faust, replay doesn't record transformation of vertices. There is nothing you can do with it yet, but is a good request.
-
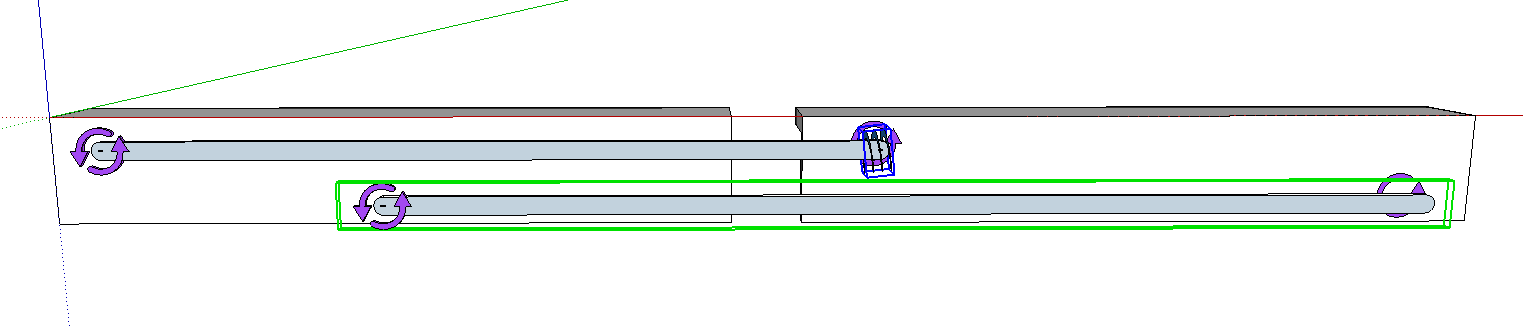
I have an odd result with a test I've been trying to get to work:
I have two aluminium pieces, connected through two aluminium bars.
One aluminium piece is static with two hinge joints (each connected to one bar).
One of the hinge joints I have set up as an angular spring to dampen the fall.
The other aluminium piece is connected to two hinge joints, each on the end of the two bars.My problem is, the system starts to wobble after 10 seconds
 , and after 30 seconds it spins out of control
, and after 30 seconds it spins out of control  .
.what am I doing wrong?
attached is the SU15 model with MSPhysics 1.0.2 and AMS_lib 3.5.2SketchUp 2015 model of MSPhysics hinged test
edit: I wanted to attach a spring (instead of using the angular spring hinge) but I believe that springs are fixed and non-movable) and somehow I can't implement this idea.
-
@robibue said:
My problem is, the system starts to wobble after 10 seconds
, and after 30 seconds it spins out of control .what am I doing wrong?
If you set simulation solver model to iterative 64 passes and update timestep to 1/120, the wobbling should be significantly reduced.
@robibue said:
edit: I wanted to attach a spring (instead of using the angular spring hinge) but I believe that springs are fixed and non-movable) and somehow I can't implement this idea.
Don't do that. Spring joints are for linear motion, not for angular. Either use angular spring, or since you want to dampen the whole thing, simply change hinge mode to Angular Friction and increase the friction parameter, to say, 4000000.
-
@anton_s said:
If you set simulation solver model to iterative 64 passes and update timestep to 1/120, the wobbling should be significantly reduced.
Thank you very much Anton, this helped

@anton_s said:
Spring joints are for linear motion, not for angular. Either use angular spring, or since you want to dampen the whole thing, simply change hinge mode to Angular Friction and increase the friction parameter, to say, 4000000.
This worked great, although I think I found the solution I was somewhat looking for using servos with an angular limit
Here's what I was aiming for
SU15, MSPhysics 1.0.2, hinged test end product with servos and hinges
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login







Advertisement