MSPhysics 1.0.3 (16 October 2017)
-
I'm really enjoying MSPhysics plug-in and have been following Sam Ketner's very insightful tutorials on Youtube. I'm wondering if there is a manual easily available, so I can bone up on some more stuff. More pressingly, I'm wondering how to attach one hinge with a bar (which appears to be in a fixed point) on a bar attached to another hinge... so that it is freely movable. I'm trying to draw an umbrella-like hinge at the moment and I'm stuck.
-
Hi, Anton,
I made this file by taking advantage of the Planned Steps.skp file you have prepared. I want the movement to begin when the space key is pressed and continue and stop until the space key is pressed again.
-
@ecati said:
I made this file by taking advantage of the Planned Steps.skp file you have prepared. I want the movement to begin when the space key is pressed and continue and stop until the space key is pressed again.
This command will be available in MSPhysics 1.0.0. Basically you will utilize the
toggle_key('space')command. It will be released soon. -
@wolfy_71 said:
I'm really enjoying MSPhysics plug-in and have been following Sam Ketner's very insightful tutorials on Youtube. I'm wondering if there is a manual easily available, so I can bone up on some more stuff. More pressingly, I'm wondering how to attach one hinge with a bar (which appears to be in a fixed point) on a bar attached to another hinge... so that it is freely movable. I'm trying to draw an umbrella-like hinge at the moment and I'm stuck.
To create movable hinges, you have to create them within the context of a desired parent group/component. Then connect it to the desired child group/component (using the MSPhysics Joint Connection Tool). That way the parent group will move and the connected child group will move relative to the parent group, while rotating around the hinge axis, which will also be relative to the parent group.
-
Hello, I would like to create text that does not of the world of the !! Example: the objects far from the center of the axis!
And I would like to create lines, shapes, points !! A radar...
-
SynSuka3D, you should explore SketchyPhysics models at 3DWarehouse on that and then write a similar script for what you want. For instance, a Radar by Mr. K: https://3dwarehouse.sketchup.com/model/c8b415a0bbb385b87e683c55e87c0665/Radar-3
-
Thanks Anton_S,
But I would like a radar of this style !! Of my model Sketchyphysics for MsPhysics!
3D Warehouse
3D Warehouse is a website of searchable, pre-made 3D models that works seamlessly with SketchUp.
(3dwarehouse.sketchup.com)
-
Well, same applies to that UAV. Just convert the code to MSPhysics. All tick tabs must be converted to
onTick {...}in script all touch tabs must be converted toonTouch { ... }in script the rest code is just converting SP functions and concepts to MSPhysics. -
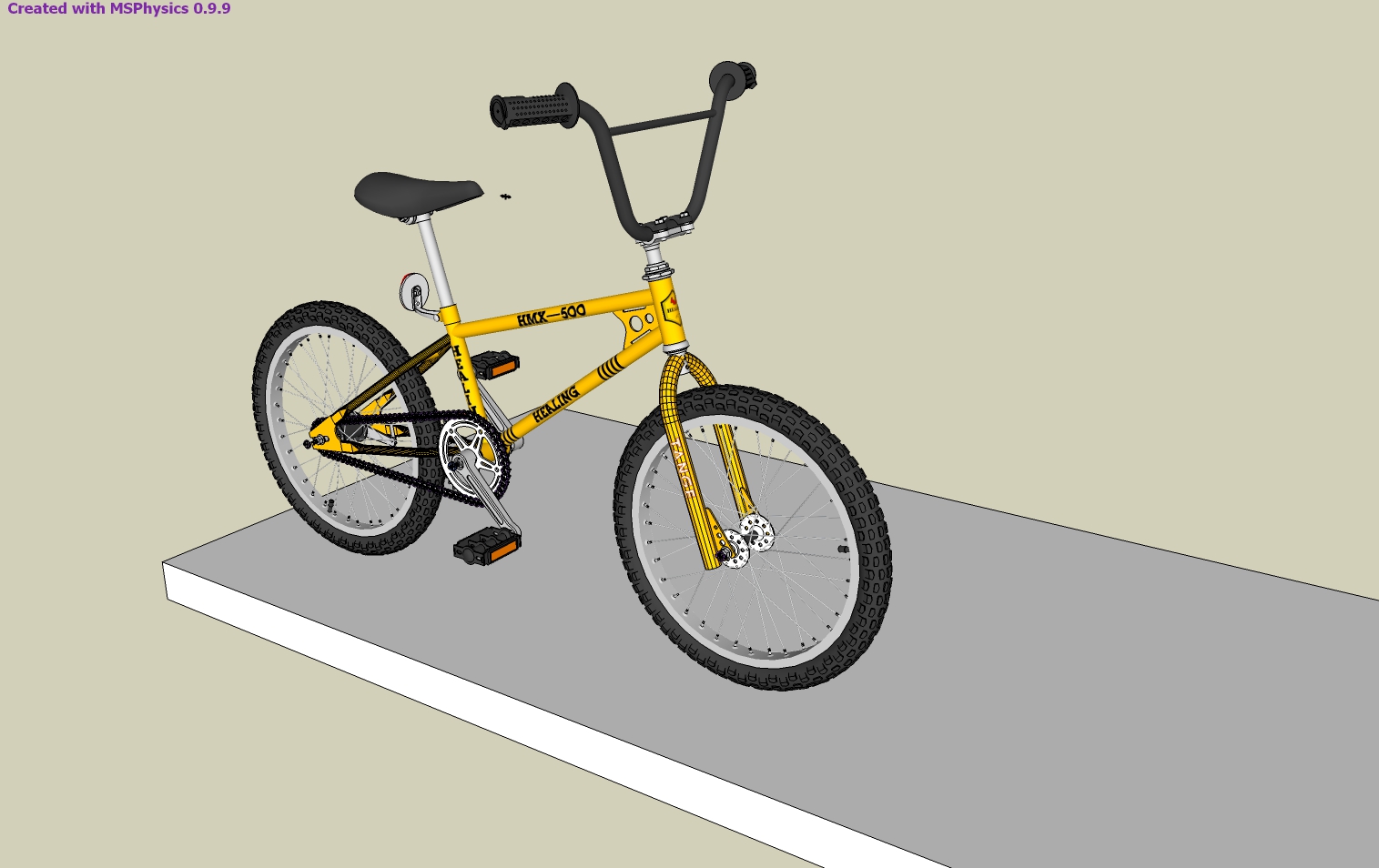
I'm trying to move this bike. But I have not been fully successful. What I do not know, what I know wrong and what my mistakes are? Thank you.
-
Ecati, that's too much joints and collisions. MSPhysics can't handle that much, especially that joints are weak and unstable when are linked into chains. If your intent is to simply play the bike, you should take an approach of making games, where only the essential parts are made to work. All you need is the frame (set to convex hull) and two wheels (set to to sphere shape). The rest could be removed or placed within the frame and set to ignore. Then a few joints, one for steering and two for motors, would guarantee you a fast working bike. But, if your approach is to simulate how the bike works, with all the moving parts, then MSPhysics is definitely not a plugin for that.
-
Hi, Anton,
My purpose is to move the bike by chain, just like it is in a real bicycle. If I understand correctly, it is not possible to do this with MSPhysics. Is it true? -
Ecati,you understood it correctly.
-
Hello !! Ecati try group the chain in another way something like like the file here ..and when you run MSPhsics delete guides( Edit>delete guides)this will make it run faster ..make a copy of your file first ...
-
Hi, Cristyan,
I applied your suggestions. But there has not been any improvement.
-
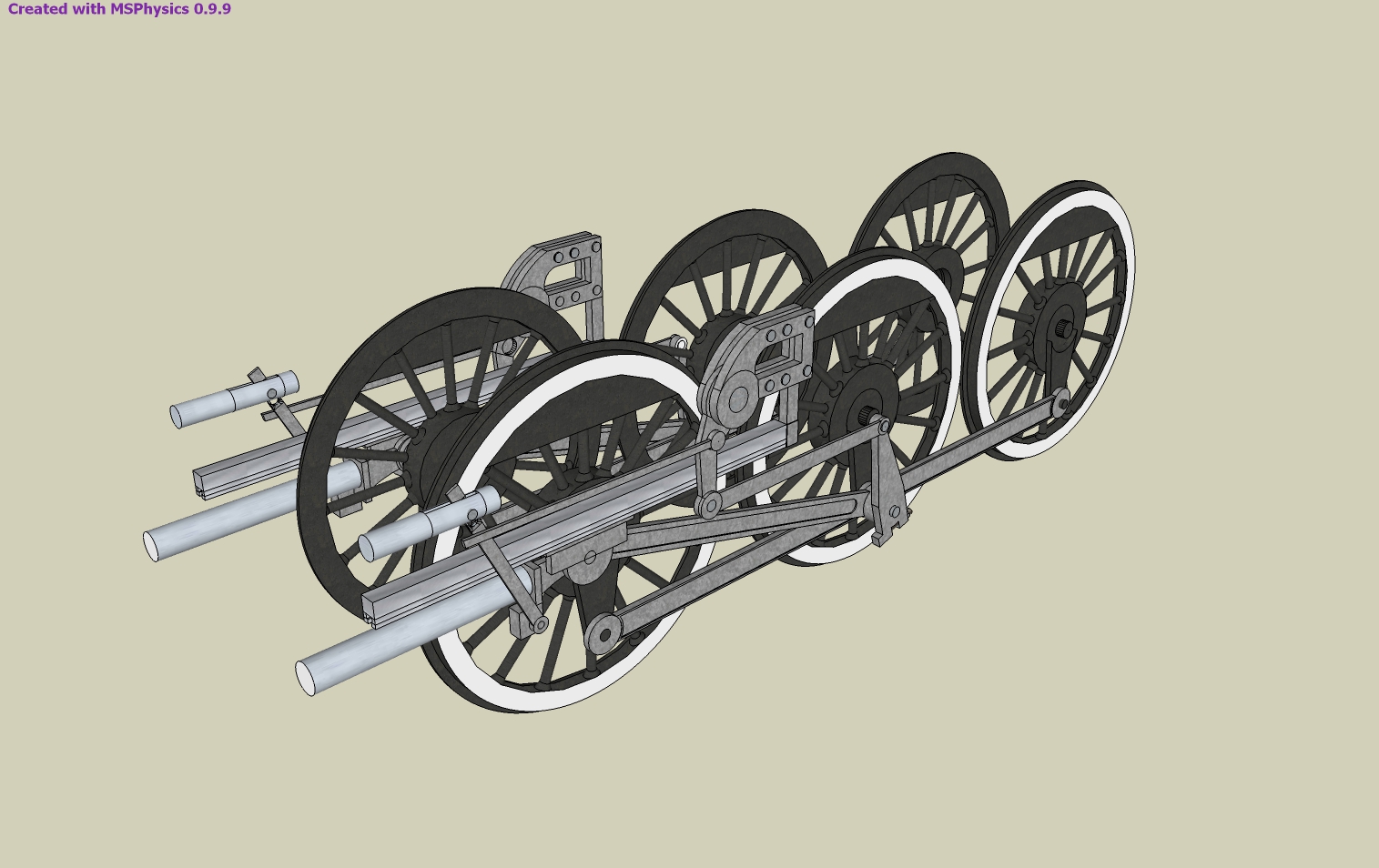
The model in the attached file hangs and disintegrates after a period of working properly. What would be the reason?
-
Hi ecati,
Interesting model with inverse kinematics.
Now it should work longer.
The main problem was the position of the external joints too far from the center of gravity of the associated components.
This has led to instability, too much friction and breakage of some joints.
In order to improve the performance, it is also useful to set as many internal groups as "Ignore" as possible.
This has to be tested in detail. I have resolved some group nesting up to a meaningful depth.
-
Thank you very much for your time and information.
-
Hello there, I am loving MSPhysics, although I am finding limited tutorials and have gotten stuck trying to make a basic monitor arm (robot arm pretty much) I understand the tools yet I am struggling to understand how to get 2 or more servos on one arm. For instance, I group my first arm to a servo, yet I cannot use the joint connection tool further into that group onto the next arm for it to stay relative to the first arm. below is a file submitted which works perfectly but I am trying to understand how he did this, is it obtainable without scripting?
here is a working example of what I want to know: https://3dwarehouse.sketchup.com/model/c3eabd528e13297ddf6d65aa66a5c53/Robot-arm
thank you!

-
Hello, Jon,
The concept of joints in MSPhysics is similar to SketchyPhysics. If you check out YouTube tutorials on joints in SketchyPhysics, same things could be accomplished through MSPhysics in a similar way, just through using MSPhysics tools.
So, to create a joint that is relative to another group, first, all arms should be top level groups. Then, within the context of each arm, add a joint and connect it to the next arm. Here, I made a quick tutorial on adding joints to a robot arm:
For the tutorial, I used the latest version of MSPhysics, which I haven't released yet but the way of doing it is not any different from the current version.
I know MSPhysics lacks the tutorials on many of its features, but that's because it is still under development. Making a tutorial with an unstable version, would make it obsolete when a better, stable, and more user-friendly version of MSPhysics is released; therefore, I want to finish the stable version first before proceeding to tutorials.
Best regards,
Anton -
Amazing reply, thank you so much!








Advertisement